

2. 南京航空航天大学 机械结构力学及控制国家重点实验室, 江苏 南京 210016
随着科学技术发展,现代战争正由地毯式打击向精准快速打击和高效损伤方向迅速发展。导弹作为直接打击目标的主要武器,其损伤效能与引信安全系统密切相关。引信安全系统的作用是确保在非战争时期导弹安全储藏以及导弹发射过程中能精准、可靠的控制弹药引爆;其本质是对隔爆部件由安全状态向待发状态转换的运动控制;其主要形式分为机械式安全系统、机电式安全系统以及电子式安全系统[1]。其中机械引信所利用的环境信息主要是环境力,弱环境很难利用,而机电式安全系统能够通过弹载计算机充分利用环境信息,把特定发射动作、导弹姿态等信息转化为电信号,精准控制引信状态,现已发展成为主流安全系统模式[2]。而机电式安全系统中,大多采用电磁电机来驱动引信隔爆机构,但在驱动器小型化过程中,电磁电机输出力矩下降迅速并且无法克服电磁干扰,因此其在引信安全系统中的应用受到一定的限制。本文利用小型直线超声电机作为驱动器驱动引信隔爆机构,克服电磁干扰和小型化问题,提高驱动器工作输出特性。
超声电机作为一种新型的微特电机,利用压电陶瓷逆压电效应,使定子驱动足处产生椭圆运动,利用定子与动子间的摩擦作用输出力与速度[3-4]其具有较多的优点,如结构设计灵活、无电磁干扰、易小型化、响应速度快、推重比大、断电自锁、可适应低温真空等极端环境、精度高等[5]。因此超声电机在很多领域得到应用。赵淳生等学者成功地将超声电机用在“嫦娥三号”月球探测器中,主要负责红外成像光谱仪定标板的驱动和控制;南京理工大学则在国内较早开展了引信用超声电机方面研究,为传统引信设计引入了新思想。2014年王炅、唐玉娟等学者提出了压电驱动器在引信安全系统中的应用并设计电机进行试验研究,其中电机输出速度为88.2 mm/s,动子行程为5 mm时保险结构对正用时为0.057 s,电机输出力为2.3 N,电机整体表现满足设计要求[6]。但是电机的装夹方式无法从文献中得知,预压力大小调节方式不明确,然而预压力大小对于直线超声电机的输出速度影响很大,无法调节预压力则无法将电机调至最佳工作状态。2015年佟雪梅等人提出一种双驱动足式直线驻波型超声电机,通过结构优化设计和一定的仿真分析,获得了满足设计要求的相关参数和驱动器工作频率[7]。不过文献只通过工作原理设计出定子的形式,没有涉及实物电机实验。2016年王春常等学者提出一种引信安全状态可恢复隔爆机构,但是对该机构的实验研究不够充分,且使用范围具有一定局限性[8]。
本文提出了一种基于双振子直线超声电机驱动的引信隔爆机构。利用有限元仿真计算,优化电机的结构参数,调整定子振动模态频率;通过电机定子、夹持一体化设计,保证预压力施加可控可调,缩小了电机结构尺寸;制作实物电机模型,通过实验测试电机输出速度、输出力与导爆孔对正时间等电机输出特性;分析了超声电机在引信安全系统应用中的优势。
1 结构及工作原理1.1 总体结构设计为实现引信安全系统对驱动器的快速响应、稳定输出等要求,设计的引信隔爆机构用直线超声电机结构如图 1所示。

|
| 图 1 电机结构示意图 |
该电机是由定子、夹持组件、动子组成。其中,底座上开有导爆孔和滑槽;动子即为隔爆构件,开有导爆孔;夹持组件包括螺杆、弹簧、螺母。图 2所示定子是由2个对称的板结构振子、夹持、驱动足组成。定子的每个振子中间开有通孔,便于将其安装在底板上,其上下表面各粘贴4片压电陶瓷片。定子与夹持、电机与引信隔爆机构都采用一体化设计,缩小整体机构尺寸,使结构更加紧凑。

|
| 图 2 定子结构示意图 |
直线超声电机是利用压电材料的逆压电效应将电能转化为压电材料弹性应变能,激发定子弹性体做微幅振动,在驱动足处形成椭圆运动。进而使得定、动子在预压力作用下产生摩擦作用,将定子微幅振动转化为动子的宏观直线运动。因此,定子驱动足处的椭圆运动和定、动子间的预压力是直线超声电机实现功能的前提。
定子左侧振子上的4片陶瓷片全部施加sinωt电激励信号, 右侧振子施加cosωt, 整个定子同时被激发出对称模态和反对称模态。如图 3所示为对称模态在坐标系中驱动足O处的位移响应, 可用下式表示:

|
| 图 3 驱动足椭圆轨迹形成示意图 |
|
式中: U为单个振子在坐标原点处的响应幅值; θ为振子振动时在坐标原点处速度方向与y轴的夹角。
反对称模态下驱动足处的位移响应可用下式表达:

|
4个位移响应同时发生, 则驱动足处的响应为:

|
(1) |

|
(2) |
消去(1) 式和(2) 式中的时间参数, 则有
|
(3) |
(3) 式中的U和θ为常数, 该式表明坐标原点即驱动足处的运动轨迹为一个椭圆。
电机的预压力施加是通过调节螺杆两侧螺母向中间旋进, 2个预压力弹簧发生形变, 夹持端受到该弹力作用, 使每个振子绕其中间螺栓做微幅转动, 进一步使得驱动足处的圆弧形柔铰发生形变, 驱动足与动子接触并压紧, 为电机提供预压力, 预压力大小可以通过弹簧弹力以及力矩平衡公式得出。
2 引信隔爆作动机构设计引信隔爆结构用于确保引信在接收解除保险指令前处在安全状态, 在收到解除保险指令后能在驱动器作用下进入待发状态。为弹药加装自毁装置, 旨在解决未爆弹问题, 但导致可靠起爆和弹药安全矛盾突出。因此, 目前包括导弹、水雷等在内的引信系统均要求具有安全状态可逆等功能, 这样既能保证引信正常解除保险又能在哑弹处理等特殊情况下使引信恢复安全状态。
如图 4所示即为直线超声电机驱动的引信隔爆结构。弹丸存储状态下, 直线超声电机断电自锁, 动子与底座上的导爆孔错开, 引信处于安全状态, 如图 4a)所示; 弹丸发射后, 根据弹载计算机对环境信息等处理发出引信解除保险指令, 直线超声电机接收该指令后通电工作, 将动子向右驱动至导爆孔对正, 进而使得传爆序列对正, 定子断电自锁后将动子固定在此处, 该机构处于待发状态, 如图 4b)所示。由于电机能够双向驱动动子, 故该引信隔爆结构能够实现引信安全状态可逆。整套装置结构紧凑, 装配可靠, 在不同型号弹药当中, 可根据实际封装需求, 灵活设计使用。

|
| 图 4 直线超声电机驱动的引信隔爆结构 |
在ANSYS workbench软件中建立定子有限元模型, 如图 5所示。定子弹性基体材料为Cr12, 压电陶瓷片材料为PZT-8。忽略陶瓷片与定子基体间粘结层对定子振动的影响, 将陶瓷与弹性体之间接触采用bond处理, 网格为自由划分。

|
| 图 5 定子有限元模型 |
为了同时激发定子的对称/反对称模态, 需要通过调节定子结构尺寸使两相模态频率尽可能靠近且远离干扰模态。为方便分析定子结构尺寸对模态频率的影响, 将定子的主要结构尺寸参数化, 建立定子的参数化分析模型。图 6为定子结构参数简图(单位:mm), 其中: a、b、h为矩形板振子的特征尺寸, t1、t2、t3为压电陶瓷片的特征尺寸, f、l1、l2、r3为驱动足的结构尺寸, xh、r1、r2为圆弧形柔性铰链的结构尺寸。定子尺寸数据较多, 根据以往经验[9]需首先确定部分尺寸大小。

|
| 图 6 定子参数化模型 |
本文设计的定子驱动足与传统的倒V形驱动足类似, 通过圆弧形柔性铰链将驱动头连接在2个矩形板的角点附近, 用xh表示铰链中心偏离矩形板竖直侧边的最近距离。h×f为驱动足和动子的接触面积, 在h一定的情况下, 接触面积的大小仅与f有关。减小定子驱动足和动子的接触面积可降低对动子上摩擦材料的粘结性[10]。f过小会使得驱动足与动子间的接触应力增大, 导致驱动足磨损加剧。综合考虑以上2种因素取f为1 mm。
铰链的圆弧厚度r2-r1是影响铰链柔度的关键因素。固定r1的取值r1=0.5 mm, 铰链柔度仅由r2决定。为避免在驱动过程铰链附近的应力集中现象, 两铰链间用半径为r3的圆弧过渡连接。根据图 6中的几何关系, 有

|
(4) |
为使定子驱动足结构不被破坏, r3还应满足
|
(5) |
由(4) 式和(5) 式得驱动足参数的约束关系

|
(6) |
综合考虑零件加工装配可行性、ANSYS网格划分的完整性, 拟定7个关键尺寸大小, 如表 1所示。
并设置了其余6个关键尺寸a、b、l1、l2、xh、r2的优化调节范围。
|
(7) |
依据定子尺寸设计要求, 确定每个设计变量的取值范围, 并在参数取值范围内选取一组参数作为定子结构的初始参数如表 2所示。
| 设计变量 | a | b | l1 | l2 | xh | r2 |
| 范围/mm | [18, 19.5] | [11, 15] | [0.5, 1] | [2, 4] | [0, 1] | [0.8, 1.6] |
| 初始值/mm | 18 | 11 | 1 | 3 | 1 | 1.2 |
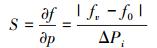
首先对上述尺寸进行工作模态(包含对称和反对称模态)频率灵敏度分析, 令f0、fv分别为定子初始及调节尺寸后的工作模态频率, Pi(i=1, 2, 3, 4, 5, 6) 分别对应a、b、l1、l2、xh、r2, 灵敏度为S
|
(8) |
取ΔPi=1 mm, 根据公式可得各个尺寸参数的灵敏度如图 7所示。

|
| 图 7 定子尺寸灵敏度 |
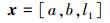
选取3个灵敏度较大的参数作为设计变量
|
(9) |
首先利用ANSYS workbench分析其对两相工作模态的影响, 如图 8所示。

|
| 图 8 结构参数对两相模态频率的影响 |
以定子对称和反对称模态频率一致性作为优化设计目标函数的优化设计原则, 由
|
(10) |
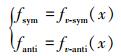
则优化设计目标函数为两工作模态的接近程度, 即

|
(11) |
式中,fsym和fanti分别表示对称、反对称模态频率。进一步采用ANSYS参数化语言APDL进行运算, 综合考虑各尺寸对电机结构、两相模态频率差的影响, 确定了调节后的参数, 如表 3所示。
表 4为定子在调节前、后工作模态的频率。尺寸优化后, 定子的对称模态频率为92 976 Hz, 反对称模态的频率为91 774 Hz, 两相模态频率差值为1 202 Hz, 与调节前相比, 两相工作模态频率一致性更高, 两相模态频率误差不超过1.3%, 满足电机的工作要求, 有利于电机在较宽的频段内工作, 提高了电机变频调速的稳定性。
定子是超声电机的核心, 为了分析定子特性, 对其开展了动力学分析, 包括定子的谐响应分析和瞬态动力学分析。
首先利用workbench中的谐响应模块对定子进行分析。在左侧和右侧振子上分别施150Vpp且相位差为π/2的交流电压信号, 定子弹性基体接地(电压设置为0)。在91~94 kHz范围内采用Full法进行谐响应分析, 得到定子在不同频率的激励信号下的稳态响应。在驱动足表面上任取一点作为观测点, 通过谐响应得到观测点的各向振幅和相位与激励频率的关系如图 9所示。

|
| 图 9 观测点振幅、相位与频率的关系 |
从图 9a)可以看出, 电机定子两相模态附近不存在干扰模态, 且具有较大的工作频率带宽(频带在1 kHz以上)。图 9b)表明了在工作频带内切向和法向位移的相位差为90°。在谐振频率91.9 kHz处, 观测点切向振幅达到最大; 在92.95 kHz处, 法向振幅达到最大; 在两相模态间的交叉点(频率92.736 kHz处)2个方向的振幅相等, 在该频率激励下观测点的切向和法向振幅均达到2.2 μm。电机的工作频率范围大致为91.9~92.95 kHz。
再利用ANSYS瞬态动力学模块分析驱动足表面质点在时域内的运动轨迹。对定子两侧振子施加相位差为π/2的简谐电压信号, 定子的对称模态和反对称模态会被同时激发出来, 得到的驱动足表面质点的位移-时间响应如图 10a)所示。

|
| 图 10 驱动足表面质点的运动响应 |
从图中可以看出, 在t=0时刻, 切向和法向位移均为0, 随着激振的进行, 驱动足表面质点的各向位移逐渐增大, 这表明定子的两相工作模态均得到了有效激发。此时在驱动足表面质点形成的运动轨迹如图 10b)所示, 运动轨迹最终趋于一个椭圆。由此可见, 定子在给定激励下能够在驱动足表面上产生预期的椭圆运动, 能够保证电机正常工作。
4 实验研究根据优化设计结果, 图 11为电机定子实物。

|
| 图 11 定子实物图 |
采用PSV-300F-B型多普勒激光测振仪对样机进行扫频测试。定子频响曲线如图 12所示。

|
| 图 12 定子频率响应 |
由图 12可以看出, 定子在扫频范围内, 频率响应曲线分别在频率91.0 kHz和93.0 kHz处出现峰值, 与仿真结果吻合。对称和反对称工作模态频率的实验测试结果和仿真结果误差分别为0.026%、0.85%, 分析误差原因:定子的弹性基体与压电陶瓷片之间是用胶水粘结的, 而在有限元计算中, 忽略了粘结层的影响使得定子结构整体刚度偏大; 由于加工误差以及装配误差等因素的存在, 理论计算的定子模型和实际定子之间必然存在差异, 但是误差在可接受范围内, 仿真分析对电机定子的设计具有参考价值。
4.2 样机机械输出特性应用KEYENCE LK-H150高速激光位移传感器, 测量在不同驱动信号下的动子的运动速度, 施加两相相位差为π/2, 峰峰值为150 V的激励电压信号, 通过改变电压信号的频率, 分别测量在不同频率下电机在单程运动中平均速度。
如图 13所示, 在90~93.2 kHz的电信号激励下, 速度都在150 mm/s以上, 最大平均速度358 mm/s。电机具有良好的速度输出性能和较大的工作频率带宽。导爆孔直径为5 mm情况下, 测试7次导爆孔对正时间。为保证隔爆的可靠性, 将导爆孔轴线错开距离设置为5.2 mm, 截取激光位移传感器采集到的与之对应的位移曲线, 测出对应时间并记录,结果如表 5所示。平均对正时间为0.016 s, 最少用时0.015 s。

|
| 图 13 电机速度-频率关系图 |
图 14为测试电机输出力大小的实验示意图。使用LC1015测力仪对样机进行输出力测试,实验表明,在激励电压峰峰值为150 V,频率为92 kHz时,电机的最大输出力可达5.0 N,根据已公开可查阅的现有文献[10],该输出力满足引信安全装置使用要求。

|
| 图 14 样机输出力测试 |
实验中采用的峰峰值为150 V的电信号仅作用在电机定子上,且定子接有地线,其在工作过程当中具有良好的漏电保护。因此,该电信号仅具有驱动电机功能,实际应用中不会对雷管及传爆序列的安全性产生影响。
5 结论针对引信安全与解除保险机构的驱动需求,设计了一种新型双振子直线超声电机。其定子与夹持采用一体化设计,实现了预压力可控可调;同时实现了电机结构和引信隔爆结构一体化设计,使作动器更加紧凑;利用ANASYS建立了有限元模型,设计了定子结构尺寸,实现了对称、反对称模态一致性调节。对定子进行动力学分析,其中谐响应分析表明电机工作模态周围无干扰模态,时域分析表明驱动足处能形成椭圆轨迹,电激励方式可行。最后制作样机开展了实验研究;定子模态实验与仿真结果吻合,工作模态附近无干扰模态。电机机械特性实验表明:电机最大输出力为5 N,单程最大平均速度为358 mm/s,导爆孔直径为5 mm情况下的隔爆对正时间仅为0.015 s。该电机具有尺寸小,结构简单,能够实现引信安全保险机构的安全与待发状态可逆调节功能,下一步将重点研究其在引信系统中应对复杂环境时的可靠性问题。
| [1] |
唐玉娟. 引信用直线型超声压电驱动原理及其应用基础研究[D]. 南京: 南京理工大学, 2014 Tang Yujuan. Fundamental Research on Linear Ultrasonic Piezoelectric Actuation Principle for Fuze and its Applications[D]. Nanjing, Nanjing University of Science and Technology, 2014(in Chinese) |
| [2] |
席占稳, 聂伟荣. 电磁驱动的引信MEMS解除保险机构[J]. 探测与控制学报, 2009, 31(5): 1-4.
Xi Zhanwen, Nie Weirong. Electromagnetic Actuated Fuze MEMS S&A Mechanism[J]. Journal of Detection and Control, 2009, 31(5): 1-4. (in Chinese) |
| [3] | Li X, Yao Z, Wu R. Modeling and Sticking Motion Analysis of a Vibro-Impact System in Linear Ultrasonic Motors[J]. International Journal of Mechanical Sciences, 2015, 100: 23-31. DOI:10.1016/j.ijmecsci.2015.06.006 |
| [4] |
王金鹏, 金家楣, 赵淳生. 行波型旋转超声电机速度稳定性研究[J]. 中国电机工程学报, 2011, 31(30): 109-116.
Wang Jinpeng, Jin Jiamei, Zhao Chunsheng. Velocity Stability Research of Traveling Wave Type Rotary Ultrasonic Motor[J]. Proceedings of the CSEE, 2011, 31(30): 109-116. (in Chinese) |
| [5] | Yokoyama K, Tamura H, Masuda K, et al. Single-Phase Drive Ultrasonic Linear Motor Using a Linked Twin Square Plate Vibrator[J]. Japanese Journal of Applied Physics, 2013, 52(7): 03-07. |
| [6] |
唐玉娟, 王新杰, 王炅. 引信安全系统的直线超声电机设计与试验研究[J]. 兵工学报, 2014, 35(1): 27-34.
Tang Yujuan, Wang Xinjie, Wang Jiong. Design and Experiment of a Linear Ultrasonic Motor for Fuze Safety System[J]. Acta Armamentarii, 2014, 35(1): 27-34. (in Chinese) |
| [7] |
佟雪梅, 王炅, 王新杰, 等. 应用于机电式引信安全系统的压电驱动器的设计[J]. 机械制造与自动化, 2015(5): 164-167.
Tong Xuemei, Wang Jiong, Wang Xinjie, et al. Design of Piezoelectric Actuator for Electromechanical Fuze Safety System[J]. Mechanical manufacture and Automation Major, 2015(5): 164-167. (in Chinese) |
| [8] |
王春常, 顾强, 安晓红. 基于转子继续转动的安全状态可恢复隔爆机构[J]. 火炮发射与控制学报, 2016, 37(1): 50-54.
Wang Chunchang, Gu Qiang, An Xiaohong. The Safe State Restoration of Interrupter Mechanism Through Rotor's Keeping Moving[J]. Journal of Gun Launch and Control, 2016, 37(1): 50-54. (in Chinese) |
| [9] |
李存岑. 矩形板超声电机的振子振型激励技术研究[D]. 上海: 上海交通大学, 2010 Li Cuncen. Study on the Exciting Technology of Rectangular Shaped Vibrators for Ultrasonic Motors[D]. Shanghai, Shanghai Jiao Tong University, 2010(in Chinese) |
| [10] |
焦海坤. 单模态压电电机多振子封装技术研究[D]. 长春: 长春理工大学, 2012 Qiao Haikun. Research on Packaging Technology of Single-Mode Piezoelectric Motor Using More Vibrators[D]. Changchun, Changchun University of Science and Technology, 2012(in Chinese) |
2. State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
