

无人机(unmanned aerial vehicle, UAV)由于其独有的成本、机动性等优势, 目前已被广泛用于战术侦察、压制敌防空系统、电子对抗等危险、恶劣的战术任务[1]。UAV的密集使用使得其协同避碰成为亟待解决的问题。
目前, 针对UAV编队内避碰问题, 解决方法主要分为几何法[2]和最小安全间隔下的航迹规划算法[3]。航迹规划算法采用势场法[4]、线性规划[5]、随机理论[6]、模型预测控制等方法进行建模。其中, 基于滚动优化(receding horizontal control)思想的模型预测控制(model predictive control, MPC)能够显式地考虑各种约束条件, 并滚动实施控制输入, 具有鲁棒性较强等特点, 因此在UAV编队保持等问题中得到了广泛应用。文献[7]采用DMPC方法将编队重构防碰撞问题转化为滚动在线优化问题, 并采用微分进化(differential evolution)方法进行求解。文献[8]针对UAV未知威胁规避航迹重规划问题, 提出一种将自学习实时A*算法与模型预测控制思想相结合的多步寻优搜索算法。从当前研究成果看, 多数文献仅考虑解决UAV间单次避碰问题[9], 针对多UAV间可能出现的多避碰冲突问题以及多UAV同时机动引发的链式反应的解决方法研究较少。Wang、邵壮等人[11-12]建立了优先级避碰协调策略, 优先级低的UAV将优先级高的UAV当做移动障碍物进行规避, 解决了多UAV同时避碰带来的链式反应, 但高优先级UAV不进行避碰动作, 使得避碰动作时间周期延长。针对UAV编队内机间协同避碰及多碰撞冲突管理问题, 本文采用DMPC方法将其转换为滚动在线优化问题, 并设计了避碰管理单元, 采用交互图机制解决多冲突管理与排序问题, 针对UAV避碰动作一致性问题, 设计了基于规则的控制策略。仿真结果表明, 该方案可以高效实现编队内多UAV协同避碰问题。
1 问题求解框架本文假定编队内所有UAV均装备有数据通信设备。UAV在每个通信周期对外发送自身的预测轨迹信息。相距一定范围之内的UAV之间可互相接收其他UAV的预测轨迹。UAV自身平台的状态(位置、航向角、速度)由其机载设备获得。每一个UAV在每一个采样时刻基于它自身状态解决一个约束优化问题,以规划其自身的避碰航迹。显然,此假定下的避碰方法属于多UAV合作式避碰。设计基于MPC思想的UAV分布式避碰航迹规划总体结构如图 1所示。

|
| 图 1 UAV分布式协同避碰航迹规划框图 |
本文设计的避碰航迹结构异步运行于每个UAV平台上。其主要由2部分组成:避碰管理单元和MPC控制器。避碰管理单元又分为3个子模块:碰撞预测模块、碰撞管理与排序模块、避碰控制约束生成模块。碰撞预测模块接收相距一定范围内的邻居UAV预测航迹,并与自身MPC控制器输出的本机预测航迹进行判断,生成预测冲突集;碰撞管理与排序模块接收相邻UAV预测航迹,与自身UAV当前时刻进行比较,基于交互图更新方法,对预测冲突集内的元素管理和排序,并确定当前时刻本UAV所要处理的碰撞冲突。避碰规则约束生成模块运用规则库中的协同避碰规则(速度规则、角度规则等),生成控制量约束集。MPC控制器根据本机当前状态、目标状态、控制约束等输入,对当前时刻的避碰约束航迹优化问题进行求解,输出控制时域内的控制向量序列和预测时域内的预测航迹。UAV控制设备按控制向量序列中的首项对UAV进行控制动作。整个流程在一个步长周期内运行一次,不断循环,从而构成一个滚动在线优化过程。本文设计的方案,每一架UAV的通信周期与其MPC滚动优化周期是重合的。但不同UAV的滚动优化过程可异步运行,不必对时间基准进行精确同步,但需要在碰撞约束条件中加入时间基准造成的状态误差因素。
2 DMPC控制器2.1 DMPC原理MPC是一种基于在线优化的控制策略, 在每个采样时刻, 它根据有限时域内对象的历史信息和未来输入, 利用对象预测模型预测系统的未来输出, 再通过某一性能指标优化对象的未来控制输入, 求解一个开环最优化问题, 得到一个控制序列, 并将该控制序列的第一个控制量作用于被控对象。在下个采样时刻, 利用新的状态测量重新求解开环最优化问题, 从而形成闭环控制。预测控制在每一时刻有一个相对于该时刻的性能指标, 能够有效地克服模型不精确、时变等因素的影响, 具有较强的鲁棒性[13]。其结构如图 2所示。

|
| 图 2 模型预测控制原理框图 |
对于MPC的实施, 分为集中式和分布式2种。集中式方法能够实现全局控制能力, 但是随着UAV数量的增加, 输入变量随之线性增加, 求解复杂度、通信量呈非线性剧烈增加。由于每架UAV的动力学特性是互相解耦的[7], 每个UAV通过独立的约束条件和状态条件, 可以对UAV进行单独控制, 在避碰过程中, 通过机间通信设备, UAV间彼此交换信息, 进行协同, 故适于采用DMPC结构进行控制。多UAV分布式协同避碰的DMPC结构需要解决两个关键问题:预测模型和滚动优化机制。
2.2 预测模型2.2.1 无人机运动模型定义UAV编队集合为

|
(1) |
O为选定坐标原点, Ox指向正北, Oy轴指向正东, Oz轴由右手定则确定。初始t0时刻, UAVi初始状态向量xi(t0)=[xi(t0), yi(t0), ϕi(t0)]T。假设所有UAV均在水平面Oxy内运动, 其质点运动模型可表示为
|
(2) |
式中, xi=[xi(t), yi(t), ϕi(t)],T 为无人机的状态向量, (xi(t), yi(t))表示UAVi位置, ϕi(t)表示UAVi航向角, ϕi(t)∈(-π, π], 北向为零, 逆时针方向为正; ui(t)=[vi(t), ωi(t)]T为UAVi控制输入向量, vi(t)表示速度大小, ωi(t)表示航向角速度。
对(2) 式进行离散化处理:设采样时间为ΔT, 则在第k个采样时刻, 对应的离散值记为xi(k)、yi(k)、ϕi(k)、vi(k)、ωi(k), 在一个采样周期[k, k+1]内, 所有控制输入均为常数, 即

|
(3) |
将(3) 式写成离散状态空间模型如下
|
(4) |
式中, yi(k+1) 表示无人机输出向量, 且Aik、Bik、Cik满足(5)~(6) 式。
|
(6) |
假设不考虑扰动和测量噪声对UAV的影响[12], 取控制时域为NC, 预测时域为N, 且NC≤N, 则有
|
(7) |
式中, j=1, 2, …, N, 当NC < j≤N时, ui(k+j-1/k)=ui(k+Nc-1/k)。
令Δui(k+j/k)=ui(k+j/k)-ui(k+j-1/k), 且在k时刻ui(k-1) 已知, 则有

|
(8) |
式中, j=1, 2, …, NC, 当NC < j≤N时, Δui(k+j-1/k)=0。
由(7)~(8) 式可得总的模型预测方程
|
(9) |
系统输出的预测方程
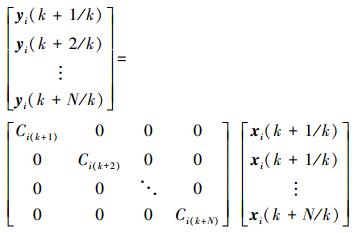
|
(10) |
在每一采样时刻, MPC通过求解一个有限时域优化问题, 得到系统当前时刻的最优控制序列, 从而实现在整个控制时域内系统的在线闭环控制。UAV协同避碰DMPC控制器滚动优化工作过程如图 3所示。

|
| 图 3 UAV分布式协同避碰MPC工作过程 |
其中, 本机状态由本机传感器获取并传送至MPC控制器, 是否需要进行避碰的判断结果由避碰管理单元中的碰撞管理与排序模块输出, 若有碰撞冲突需要处理, 则MPC控制器从碰撞管理与排序模块接收碰撞冲突对方UAV的ID号, 并依此读入此UAV的预测轨迹, 然后从协同避碰控制约束生成模块接收控制量约束以及距离约束, 通过预测模型得到带有控制量参数的预测状态。优化目标函数预先设定, 由此得到滚动在线优化问题的一步, 通过一定的算法对一步优化问题进行求解后, 将结果输出至无人机动作控制单元。
2.3.2 优化指标优化指标取为能力-时间组合最优[15], 则无人机避碰最优控制指标可由下式描述

|
(11) |
式中

|
yri(k)为参考轨迹, 目的为避免过程出现输入和输出的剧烈变化, 要求当前输出值yi(k)沿着一条期望的、平缓的曲线达到UAV目标状态yTi(k)。参考轨迹广泛采用一阶指数变化形式[14]

|
(12) |
1) 无人机性能约束
|
(13) |
式中, 

2) 协同避碰控制约束
|
(14) |
式中, 
3) 无人机避碰距离约束
每架UAV定期对外发送其MPC计算的预测信息。位于其一定通信距离范围内的友邻UAV可以接收其信息并进行处理。定义


|
(15) |
定义

|
(16) |
式中, “‖· ‖”表示二维平面内的欧氏距离, ds为最小安全距离。
3 避碰管理避碰管理单元分为冲突检测、冲突管理与排序、避碰控制量约束生成3个子模块。其中, 冲突检测模块在每个采样周期(同时也是通信周期), 接收其他UAV发送的信息, 生成自身的邻居节点集, 进而计算UAV的潜在冲突节点集。冲突管理与排序模块使用交互图方法对UAV的冲突节点集中元素进行管理维护, 并按照一定规则进行避碰优先级排序。避碰控制量约束生成模块接收冲突管理与排序模块的输出结果, 选择当前时刻处理的碰撞冲突, 按照设定的避碰规则, 生成控制量约束结果并送至DMPC输入。
3.1 冲突检测假定避碰信息交互起始距离为dif。当UAV间距离小于dif时, 在每一采样时刻, UAV间互相交换它们的预测轨迹。在每一时刻tk, UAVi计算距离小于dif的“邻居”节点, 定义其“邻居”节点所构成的集合为

|
(17) |
若在预测轨迹中, 存在一个时刻使得2架UAV间距离小于ds, 则定义2架UAV存在潜在冲突。因此, 对于任一UAVi∈VUAV, 定义其潜在冲突集
|
(18) |
式中, 


对于UAV机群编队中的每架UAV, 在其MPC预测时域内, 可能与其他多架UAV存在多个碰撞冲突, 若不对多个碰撞冲突进行管理以及两冲突UAV之间进行协同动作, 而是随机选取一个进行处理, 则会由于UAV的分布式处理特性, 导致避碰动作不一致, 进而造成链式反应[12], 产生新的冲突。为此, 本文基于多碰撞优先级排序思想, 设计一种避碰交互图维护方法。对于UAVi, 在任意时刻tk, 其自身的避碰交互图定义为

|
(19) |
式中, VUAV(i)(t)为t时刻与UAVi具有避碰信息交互关系的节点集。节点j对应UAVj。Eι(t)⊆VUAV×VUAV, 为避碰交互图的边集, 其元素(i, j)表示UAVi和UAVj为预测冲突邻居关系, 且约定i为leader节点, j为follower节点。边的长度定义为UAVi, UAVj的预测冲突到达时刻
为满足多UAV协同避碰分布式决策一致性要求, 对任一UAVi∈VUAV, 在任意tk时刻, 对避碰交互图设定如下规则:
1) 交互信息图中至多存在一个冲突leader节点。
2) 与UAVi具有预测冲突的节点在UAVi的避碰交互图中均与UAVi节点有且仅有一条有向边相连。
3) 若存在leader节点, 则连接leader节点与的边具有最小的长度。
4) 若(j, i)∈Ei(tk), 则(j, i)∈Ej(tk)或(i, j)∈Ej(tk)。(j, i)∈Ei(tk)是(j, i)∈Ej(tk)的必要非充分条件, 反之亦然。
典型的避碰交互图如图 4所示:

|
| 图 4 避碰交互图典型结构 |
图 4中, 中心位置的节点为避碰交互图自身的节点UAVi, 避碰交互图中边的起点节点为leader, 终点为follower。图 4中左边所示的为避碰交互图中具有一个leader节点的情形, UAVi的leader为UAVj3。右边所示为无leader的情形, 即避碰交互图中所有其他节点均为UAVi的follower。
设计避碰交互图中leader节点的确定原则如下:
1) 越早出现的预测冲突具有越高的处理优先级。
2) 速度高者为leader, 速度相同则初始优先级高者为leader。
对于任一UAVi∈VUAV, 假设当前时刻为tk, 设计Leader节点生成算法如下:
Step1 Ei(tk)=ø;
Step2 遍历Ci(tk), 定义Ci(tk)所有元素中


Step3 若UAVi在tk-1时刻速度高于UAVp, 即vi(tk-1)>vp(tk-1), 则(p, i)∈Ei(tk), 否则(i, p)∈Ei(tk)。若二者速度相等, 则通过初始优先级确定leader节点。
Step4 将Ci(tk)中剩余其他元素对应的UAV节点设置为UAVi的follower。
避碰交互图计算程序流程图如图 5所示。

|
| 图 5 避碰交互图计算程序流程图 |
通过运行避碰交互图更新算法, 对于任一UAVi∈VUAV, 某一任意时刻, 避碰交互图中包含了所有与具有预测冲突关系的UAV节点及预测冲突到达时间, 并使得避碰交互图中有且仅有一个最高优先级节点UAVp, 以及UAVi与UAVp的leader-follower关系。UAVi在当前时刻应处理与UAVp的碰撞冲突而忽略与其他节点的碰撞冲突。为保证多UAV分布式处理动作的一致性, 所有UAV必须统一时间基准。
3.3 避碰策略每个避碰交互图更新计算方法, 对于任一UAVi∈VUAV, 确定了当前时刻需要处理的冲突
|
(20) |
式中, θm、θs、Δθm、Δθs分别为leader节点的航向角、航向角控制增量以及follower节点的航向角、航向角控制增量, 并有θm∈[0, 2π)、θs∈[0, 2π), 手定则确定航向角正方向。η=θm-θs, 为leader节点与follower节点的航向角之差。协同航向角控制规则示意图如图 6所示:

|
| 图 6 角度控制规则 |
图中虚线箭头所示分别为leader节点和follower节点的初始速度方向, 实线为2架UAV统一实施航向角控制策略后的航迹。
4 避碰航迹规划过程设计基于MPC思想的分布式协同航迹规划处理过程如图 7所示:

|
| 图 7 UAV协同避碰航迹规划方案流程图 |
任一采样时刻k, UAVi通过编队通信网络接收距其一定距离范围内的友邻UAV预测信息, 通过机内传感器获得本机当前状态信息xi(tk), 计算邻居集、冲突集, 然后更新交互图, 确定当前时刻待处理最高优先级冲突, 并通过协同控制规则确定UAVi控制量约束, 将Xp(k-1)、xi(tk)、Constrains(uki)以及UAVi性能约束、指标函数Jik输入至DMPC控制器, 求解一步优化问题, 生成UAVi的状态预测序列Xi(k)以及控制预测序列Ui(k); 最后对UAVi应用Ui(k)中第一项ui(k), 通信对外发送Xi(k), 完成循环, 直至任务结束。
5 仿真分析本文采用MATLAB优化工具包对MPC滚动优化过程进行求解, 在任一采样时刻, 若有碰撞冲突, 则该优化问题为非线性规划问题, 采用fmincon进行求解。若无碰撞冲突产生, 则该步优化为标准的二次规划问题, 采用MATLAB优化工具quadprog进行求解。
为验证本文设计的分布式协同避碰方法的有效性, 分别对2架UAV、4架UAV 2种情况, 使用航向角变化规则, 速度大小保持不变, 对多无人机协同避碰过程进行仿真, 假定整个飞行过程中UAV速度保持不变。基本参数设置如下
|
为简化计算, 假设MPC的预测控制序列中仅第一项不为0, 即MPC预测控制序列中角速度输入序列形如(ω1, 0, …, 0)。假设UAV获取自身状态信息是完全准确的, 即仿真中UAV当前时刻获取的状态等于MPC在上一时刻模型计算输出的本时刻状态。
5.1 2架UAV协同避碰无人机初始信息、终点信息、性能参数设置如表 1所示。
| UAV序号 | 初始状态 /(m, m, rad) |
目标状态 /(m, m, rad) |
速度 /(m·s-1) |
角速度 /(rad·s-1) |
角加速度 /(rad·s-2) |
| 1 | (5000, 0, π) | (0, 0, ——) | 85 | [-0.2, 0.2] | [-0.1, 0.1] |
| 2 | (0, 0, 0) | (5000, 0, ——) | 85 | [-0.2, 0.2] | [-0.1, 0.1] |
仿真程序运行计算机基本配置:Intel Core i3 3.1GHz、3G内存。设置仿真步数为100步, MPC单次循环运行时间最大为0.21 s, 平均运行时间为0.11 s, 可满足ΔT=1 s条件下实时性要求。规则对仿真结果如图 8所示。

|
| 图 8 2架UAV协同避碰仿真结果 |
2架UAV设置的性能参数相同, 初始状态、目标状态与对方UAV相反, 由图 8a)~图 8(b)可以看出, 2架UAV整个仿真周期内按照航向角变化规则, 角度变化量完全一致。为直观显示, 图 8b)中航向角显示未约束在[0, 2π)范围内。图 8c)中显示的2架UAV距离变化情况, 其中纵坐标为2架UAV间距减去最小安全间距ds的值, 由图 8c)可以看出, 其值全部在纵轴上方。在第30步处, 2架UAV间距最小, 为501.72 m。第60步, 2架UAV同时到达终点。说明2架UAV通过本文设计的方法, 可以有效实现分布式协同碰撞规避。
5.2 4架UAV多冲突协同避碰4架UAV初始信息、终点信息、参数设置等如表 2所示。
| UAV序号 | 初始状态 /(m, m, rad) |
目标状态 /(m, m, rad) |
速度 /(m·s-1) |
角速度 /(rad·s-1) |
角加速度 /(rad·s-2) |
| 1 | (5000, 0, π) | (0, 5000, ——) | 90 | [-0.2, 0.2] | [-0.1, 0.1] |
| 2 | (0, 0, π/4) | (5000, 5000, ——) | 90 | [-0.2, 0.2] | [-0.1, 0.1] |
| 3 | (5000, 2500, π) | (0, 3000, ——) | 60 | [-0.2, 0.2] | [-0.1, 0.1] |
| 4 | (0, 1500, 0) | (0, 3000, ——) | 70 | [-0.2, 0.2] | [-0.1, 0.1] |
根据初始参数设定, 若不进行避碰处理, 将会出现(UAV2, UAV4, 18 s), (UAV1, UAV2, 26 s), (UAV1, UAV3, 26 s), (UAV2, UAV3, 28 s)4组碰撞冲突, 第二个冲突与第三个冲突同时发生, 并且与第四个冲突仅间隔2 s。运用避碰规则后, 仿真结果如图 9所示。

|
| 图 9 4架UAV协同避碰仿真结果 |
本次仿真中仍使用航向角变化规则进行分布式自主协同避碰, UAV速度大小保持不变。由图 9中可以看出, 使用本文设计的避碰解决方案后, 4架UAV可以有效进行分布式协同避碰, 特别是对于同时或者极小间隔内出现的出现的多组冲突也能有效解决, 解决了多冲突同时发生时, UAV分布式避碰控制带来的可能的链式反应, 4架UAV间距始终保持在大于安全间距。由图 9a)可以看出, 4架UAV在进行避碰控制后的飞行航迹, 与不考虑避碰的航迹整体偏离值较小。由图 9c)可以看出, 在进行分布式避碰控制后, 为解决前一冲突而进行的UAV状态改变又导致了新的冲突出现或者原有的后续冲突自动消除, 最终解决的冲突序列与最初设定的冲突序列并不完全相同。
5.3 方案比较对于5.2节中所设定的4架无人机初始及目标状态, 在相同仿真环境下, 对本文采用的方案同文献[12]中UAV间互碰规避采用的“低优先级UAV将高优先级UAV视为移动障碍物进行规避”方案进行比较。由于文献[12]待解问题与本文不同, 故对比分析时仅将UAV间避碰策略进行了代换, 其他模块完全相同。为行文简化, 后文称本文的避碰策略为方案一, 称文献[12]中的方案为方案二。假定4架UAV根据执行任务的紧急程度, 优先级由高至低顺序为UAV1、UAV2、UAV3、UAV4。由于在MATLAB优化工具包中fmincon函数时, 使用了随机函数进行赋初值操作, 使得求解具有一定随机性, 故2种方案均运行20次, 对4架UAV的到达时间均值和均方差, 总控制量均值和均方差4项指标进行比较。由于2种方案中UAV速度均保持不变, 定义总控制量如(21) 式所示。

|
(21) |
采用本文的解决方案时, 在设定的150步内, 全部仿真出可行结果。其统计结果如表 3所示。其中EX(Tr)、SX(Tr)、EX(C)、SX(C)、Ref(Tr)、Ref(C)分别表示到达时间均值、到达时间均方差、总控制量均值、总控制量均方差、到达时间参考量、总控制量参考量, 到达时间参考量和总控制量参考量分别为不进行避碰动作的到达时间和总控制量。
| UAV 编号 |
EX(Tr) | SX(Tr) | EX(C) | SX(C) | Ref(Tr) | Ref(C) |
| 1 | 79.8 | 0.45 | 0.48 | 0.00 | 79 | 0 |
| 2 | 80.8 | 0.45 | 0.45 | 0.00 | 79 | 0 |
| 3 | 87.6 | 2.07 | 0.64 | 0.21 | 84 | 0.02 |
| 4 | 91.6 | 1.95 | 0.35 | 0.03 | 77 | 0.06 |
采用第二种方案时, 20次仿真中, 7次在150步内程序终止, 部分UAV未到达目标状态。其余13次可行解的运行统计结果如表 4所示。
| UAV 编号 |
EX(Tr) | SX(Tr) | EX(C) | SX(C) | Ref(Tr) | Ref(C) |
| 1 | 79 | 0 | 0 | 0 | 79 | 0 |
| 2 | 83.2 | 6.06 | 0.72 | 0.16 | 79 | 0 |
| 3 | 96.4 | 7.64 | 0.47 | 0.12 | 84 | 0.02 |
| 4 | 90.8 | 11.65 | 0.90 | 0.30 | 77 | 0.06 |
通过对比可以得出以下结论:
1) 在到达时间均值指标上, 方案一中UAV2、UAV3、UAV4得到达时间均值、均方差, 均优于方案2, 说明方案一因避碰动作造成的航迹偏离较小。且到达时间均方差较小, 解的稳定性高于方案二。方案2中由于使用固定优先级且高优先级不进行避碰动作, 故UAV1不进行避碰控制。
2) 控制量指标上, 两种方案在总控制量均值上无明显优劣, 均值和分别为1.915、2.085。方案一的总控制量均方差值总体小于方案二, 说明多次仿真中解的稳定性高于方案二。
6 结论本文设计的UAV编队内协同避碰航迹规划方案, 采用DMPC思想, 将避碰过程转化为滚动在线优化问题; 针对多碰撞冲突管理问题, 设计了分布式避碰管理单元, 采用交互图更新机制对冲突进行管理和排序, 选择优先级最高的冲突进行处理; 针对避碰UAV双方的动作一致性问题, 设计了基于航向角变化规则的协同避碰控制策略。仿真结果表明, 本文方案可有效解决多UAV间多碰撞冲突规避问题, 与文献[12]相比, 到达时间、总控制量等指标更优。本文仿真中, MPC优化问题求解采用的时MATLAB工具包, 协同避碰策略采用了航向角控制策略。今后可采用启发式算法以及速度、航向角同时协同变化策略对该方案展开进一步研究。
| [1] |
沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法[M]. 北京: 国防工业出版社, 2013: 15-20.
Shen Lincheng, Niu Yifeng, Zhu Huayong. Theories and Methods of Autonomous Cooperative Control[M]. Beijing: National Defence industry Press, 2013: 15-20. (in Chinese) |
| [2] | Anusha M, Radhakant P. Reactive Collision Avoidance Using Geometric and Differential Geometric Guidance[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(1): 303-310. DOI:10.2514/1.50923 |
| [3] |
刘慧颖, 白存儒, 杨广珺. 无人机自主防撞关键技术与应用分析[J]. 航空工程进展, 2014, 5(2): 144.
Liu Huiying, Bai Cunru, Yang Guangjun. Application and Analysis and Discussion of Autonomous Collision Avoidance Techniques for Unmanned Aerial Vehicle[J]. Advances in Aeronautical Science and Engineering, 2014, 5(2): 144. (in Chinese) |
| [4] | Khatib O B. A Unified Approach for Motion and Force of Robot Manipulators[J]. IEEE Journal of Robotics and Automation, 1987, 3(1): 43-53. DOI:10.1109/JRA.1987.1087068 |
| [5] | Chou F Y, Yang C Y, Yang J S. Support Vector Machine Based Artificial Potential Field for Autonomous Guided Vehicle[C]//Proceedings of the 4th International Symposium on Precision Mechanical Measurements, Bellingham, WA, 2008, 71304J:1-6 |
| [6] | Temizer S, Kochenderfer M J, Kaelbling L P, et al. Collision Avoidance for Unmanned Aircraft Using Markov Decision Processes[C]//Proc AIAA Guidance, Navigation, and Control Conference, 2010 |
| [7] |
魏瑞轩, 吕明海, 茹常剑, 许卓凡. 基于DE-DMPC的UAV编队重构防碰撞控制[J]. 系统工程与电子技术, 2014, 36(12): 2473-2478.
Wei Ruixuan, Lü Minghai, Ru Changjian, Xu Zhuofan. Reconfiguration Collision Avoidance Method for UAV's Formation Based on DE-DMPC[J]. Systems Engineering and Electronics, 2014, 36(12): 2473-2478. (in Chinese) |
| [8] |
李季, 孙秀霞. 基于多步寻优搜索的无人机航迹重规划算法[J]. 系统工程与电子技术, 2009, 31(10): 2510-2512.
Li Ji, Sun Xiuxia. Route Replanning's Method For Unmanned Aerial Vehicles Based on Multi-Step Optimizing Search Algorithm[J]. Systems Engineering and Electronics, 2009, 31(10): 2510-2512. DOI:10.3321/j.issn:1001-506X.2009.10.051 (in Chinese) |
| [9] | Thomas J Stastny, Gonzalo A Garcia, Shawn S Keshmiri. Collision and Obstacle Avoidance in Unmanned Aerial Systems Using Morphing Potential Field Navigation and Nonlinear Model Predictive Control[J]. Journal of Dynamic Systems, Measurement, and Control, 2015, 137. |
| [10] | Nathan E Smith, Richard G Cobb, Scott J Pierce. Optimal CollisIon Avoidance Trajectories Via Direct Orthogonal Collocation for Unmanned/Remotely Piloted Aircraft Sense and Avoid Operations[C]//AIAA Guidance, Navigation, and Control Conference, Maryland, 2014 |
| [11] | Wang Y H, Vivek Y, Balakrishnan S N. Cooperative UAV Formation Flying with Obstacles/Collision Avoidance[J]. IEEE Trans on Control Systems Technology, 2007, 15(4): 672-679. DOI:10.1109/TCST.2007.899191 |
| [12] |
邵壮, 祝小平, 周洲, 等. 三维动态环境下多无人机编队分布式保持控制[J]. 控制与决策, 2016, 31(6): 1068-1069.
Shao Zhuang, Zhu Xiaoping, Zhou Zhou, et al. Distributed Formation Keeping Control of UAVs in 3-D Dynamic Environment[J]. Control and Decision, 2016, 31(6): 1068-1069. (in Chinese) |
| [13] |
李飞, 于雷, 周中良, 等. 战斗机末端机动的非线性模型预测控制规避策略[J]. 国防科技大学学报, 2014, 36(3): 83-90.
Li Fei, Yu Lei, Zhou Zhongliang, et al. The Nonlinear Model Predictive Control Avoidance Strategy of the Fighter Maneuver in Endgame[J]. Journal of National University of Defense Technology, 2014, 36(3): 83-90. DOI:10.11887/j.cn.201403016 (in Chinese) |
| [14] |
陈薇, 蒋旭云. 关于轮式机器人路径规划控制仿真[J]. 计算机仿真, 2016, 33(5): 367-371.
Chen Wei, Jiang Xuyun. The Simulation of Wheeled Robot Path Planning Control[J]. Computer Simulation, 2016, 33(5): 367-371. (in Chinese) |
| [15] |
许健, 孙秀霞, 李大东. 模型预测控制在飞行器规划系统中的应用[J]. 传感器与微系统, 2011, 30(7): 143-145.
Xu Jian, Sun Xiuxia, LI Dadong. Application of Model Predictive Control in the Aerial Vehicle Programming System[J]. Transducer and Microsystem Technologies, 2011, 30(7): 143-145. (in Chinese) |
| [16] | Hojjat A Izadi, Brandon W Gordon, Youmin Zhang. Rule-Based Cooperative Collision Avoidance Using Decentralized Model Predictive Control[C]//AIAA Infotech@Aerospace Confernce, 2011 |
