

近年来海洋环境的监测与保护越来越受到人们的重视, 匹配场处理(matched field processing, MFP)作为一种新兴的海洋观测手段受到了国内外学者的广泛关注, 该方法的本质是在具有环境模型的基础上仿真声场信息并与真实声场进行对比。该方法作为一种空域滤波技术被广泛应用在海洋环境参数反演、水声环境中离散噪声源的抑制及水下目标的被动定位等领域[1-3]。
虽然匹配场处理充分利用了环境信息, 具有远优于常规阵列处理算法的优点, 但当环境参数(如水中声速、基底衰减等)或系统参数(如阵元间距、基阵位置等)发生变化时, 会出现匹配场失配情况, 有时匹配场处理的效果会急剧变差, 甚至出现失效的情况。然而真实的海洋环境, 特别是浅海环境, 极易受到风浪、洋流和海面航船等的影响, 是个时变和空变的复杂声传播信道, 极大制约了匹配场处理的应用[4-5]。
为了获得稳健的处理性能, 国内外学者对匹配场处理进行了深入的研究, 按照处理思路的不同可分为3类:① 多约束算法, 例如邻域位置约束匹配场处理器MV-NLC(minimum variance-neighborhood location constraints)和最小方差环境扰动约束匹配场处理器MV-EPC(minimum variance-environmental perturbation constraints)等, 该类方法通过约束观测方向或环境扰动建立了多个线性约束条件, 从而为主瓣提供保护, 但约束区域的大小或扰动范围的选择对处理结果影响较大。② 子空间算法, 例如特征提取处理器FEM(feature extraction methods)和SF(sector focusing)处理器, 该类算法通过区分声场信息中的信号分量和噪声分量来开展工作, 通过摒弃噪声分量提高处理器的稳健性, 但通常较难区分信号分量和噪声分量。③ 统计类算法, 例如最优不确定场处理器OUFP(optimum uncertain field processor)和相位下降搜索法PDS(phase descent search)等, 该类算法通过在扰动或相位空间内积分来消除环境和噪声的影响, 运算量很大[6-8]。
为了提高匹配场处理对环境扰动和噪声的抑制能力, 提高算法的稳健性, 本文对环境扰动和噪声进行了建模, 在简正波模型的基础上通过使用最小二乘算法抑制环境扰动和噪声来改善算法的性能, 是一种类似于子空间算法的处理方法。最后使用1994年在意大利北厄尔巴岛附近海域[9]的一次海试实验对本文算法进行验证, 结果表明本文提出的基于最小二乘的匹配场处理方法具有优于常规匹配场处理器的性能。
1 最小二乘匹配场处理的原理1.1 浅海环境下的声场模型在分层海洋波导环境下, 根据简正波理论, 每个阵元接收到的声场是所有模态的叠加, 位于zs深处的声源在(r, z)处产生的远场声场可表示为[5]
|
(1) |
可将其简写为
|
(2) |
式中
|
(3) |
表示第m阶简正波模态系数; ϕm(z)为第m阶简正波的模态函数; ξm为第m阶简正波的水平波数; M为波导中有效传播的简正波模态数。
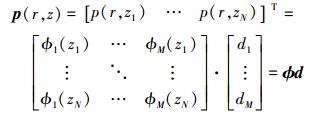
采用一个N元垂直线列阵接收远场声源辐射的信号, 第n个阵元的深度为zn, 则接收基阵处的声场可以写成如下矩阵形式[10]
|
(4) |
式中, T表示求矩阵的转置; p(r, z)是垂直线列阵接收的N×1维声压场; p(r, z)是单个阵元处的声压; ϕ是各阶简正波的抽样模态函数, 为N×M维矩阵; d是M×1维的模态系数向量。
1.2 常规匹配场处理器若已知垂线阵的测量场和海洋环境模型, 线性匹配场处理器(又称常规匹配场处理器CMFP)的模糊度图表达式如下[1]

|
(5) |
式中

|
(6) |
|
(7) |
式中, pc(r, z)表示在某种环境模型下声源位于(r, z)处的声压场, 是使用简正波模型或其他物理模型预测的声场, 又称拷贝场; p(rs, zs)表示声源位于(rs, zs)处时的声压场, 是实测的声压场, 又称为测量场; R(rs, zs)是测量场的采样协方差矩阵(covariance matrix)。环境模型是通过大量的观测数据得到的真实环境的近似值, 通常会和真实环境出现偏差, 且接收的测量场会被环境噪声和系统噪声所影响, 这2个因素会极大地影响匹配场的性能。
1.3 稳健的最小二乘匹配场处理器设声基阵接收到的测量场包含均值为零的加性高斯白噪声, 同时, 由于真实环境和环境模型的不一致, 模态函数矩阵ϕ也会存在随机误差, 根据(4) 式此时声基阵实际接收的测量场可表示为

|
(8) |
式中, pN为无误差的测量场; ϕN为无误差的模态函数; ΔpN和ΔϕN分别为二者的误差, 或称为扰动。为了能够精确地估计模态系数d, 总是希望误差尽可能小, 这种情况下(8) 式描述的数学问题可转化为
|
(9) |
约束优化(constrained optimization)条件pN+ΔpN=(ϕN+ΔϕN)d有时也表示为pN+ΔpN∈range(ϕN+ΔϕN)。为了简单起见, 把等式(8) 改写为
|
(10) |
式中, B=[ϕN, pN]称为增广数据矩阵, D=[ΔϕN, ΔpN]称为增广校正矩阵或扰动矩阵, 二者均为N×(M+1) 维矩阵; x=[dT, -1]T为(M+1)×1维列向量。(10) 式的数学意义为:求一个具有最小范数平方的扰动矩阵D∈CN×(M+1), 使得矩阵B+D是非满秩的。该最优化问题可以写成一个带约束的最小二乘问题

|
(11) |
由于x是扩展的列向量, xHx=dHd+1, 因此令优化约束条件xHx=2。设N×(M+1) 维增广矩阵B的奇异值分解为
|
(12) |
式中, Σ=diag(σ1, σ2, …, σM+1), 把奇异值按照从大到小的顺序排列:σ1≥…≥σM+1, 与这些奇异值对应的右奇异向量为:v1, …, vM+1。假设由于环境的失配, 仅有k阶模态对声场有稳定的影响(k≤M), 此时可设前k个奇异值满足σ1≥…≥σk, 忽略其他的M-k阶模态。
设右奇异向量vi是子空间

|
(13) |
中的任意一个列向量, 则每个右奇异向量vi都对应一组最小二乘解

|
(14) |
式中, αi是向量vi的第一个元素, 而其他的元素组成yi, 即vi=[αi, yiT]T, 因此会有M+1-k个最小二乘解, 需要找出在某种意义下唯一的总体最小二乘解。Golub和Van Loan提出了最小范数意义下的最小二乘解[11], 可以很好地解决这个问题, 针对本文的具体问题, 他们的算法可以简化为以下几个步骤:
1) 计算增广矩阵的奇异值分解(SVD:singular value decomposition) B=UΣVH;
2) 当阵元数N小于等于模态数M时, 令主奇异值的个数k=N; 否则, 令k=M;
3) 令V1=[vk+1, vk+2, …, vM+1], 其中V1是由右奇异矩阵V的后M+1-k列组成的子矩阵, V1是(M+1)×(M+1-k)维矩阵;
4) 设v1表示V1的第一行, 是M+1-k维行向量; V2表示去掉V1的第一行后剩下的矩阵, 是M×(M+1-k)维矩阵, 即V2比V1少一行。则最小范数意义下的最小二乘解为
|
(15) |
接着可用(4) 式重新计算测量场, 此时, 稳健的最小二乘匹配场处理器可表达为如下方式, 简写为LSMFP

|
(16) |
式中
|
(17) |
本文使用Naval Research Laboratory的研讨会上公布的海试数据[9]验证LSMFP的性能。该实验在意大利西海岸附近的海域展开, 其环境参数的模型如图 1所示。

|
| 图 1 浅海环境模型 |
实验中使用一个48元垂直线列阵接收170 Hz的声信号, 第一个阵元的深度为18.7 m, 最后一个阵元的深度是112.7 m, 阵元间距为2 m, 阵孔径为94 m。声源被锚定在距接收阵5 500±200 m远处, 深度约为79 m。阵通过一个砂囊锚定在海底, 因此会随着海浪的起伏等有所扰动, 无法保持理想情况下的垂直。在使用简正波理论计算拷贝场时, 认为阵形及阵元间距保持不变。
2.2 实验数据此实验声源的中心频率为170 Hz, 数据采集系统的采样频率为1 kHz, 实验中分不同时间段共采集了10组数据, 每组数据代表1分钟的连续采样, 平均输入信噪比约为15 dB。图 2是第1#阵元在0~0.5 s的时域波形, 其他时刻信号波形类似, 由于信号中混有其他频率的干扰及噪声, 较难从时域图中辨别出信号波形。

|
| 图 2 第1#阵元0~0.5 s的时域波形 |
图 3是第1#阵元在第1分钟接收到信号的时频图, 从图中可清楚看出, 信号频率为170 Hz, 且持续了1分钟。

|
| 图 3 第1#阵元在第1分钟的时频图 |
下面使用这次实验采集的数据, 分别用CMFP和LSMFP匹配场处理器完成了该声源的被动定位。
2.3 实验结果设观测海域的距离从1~0 km, 步长50 m; 深度从2~127 m, 步长1.3 m。图 4a)和图 4b)分别是CMFP和LSMFP对第1分钟数据的定位结果, 是这2种匹配场处理器的模糊度图。

|
| 图 4 CMFP和LSMFP定位结果对比 |
图中矩形区域的亮点是匹配场处理器计算出的声源位置, 也是定位模糊度平面的最大值, 矩形宽400 m, 高12 m, 若矩形区域覆盖真实声源位置则认为定位正确; 椭圆区域代表目标所在的真实位置。由图 4a)可明显看出CMFP的定位结果和真实声源的位置差别极大, CMFP确定的目标位置为(距离8 200 m, 深度89.1 m), 记为(8 200m, 89.1 m), 输出信干比(SINR:signal to interference noise ratio[12])为3.64 dB, 峰值背景比(PBR:power to background ratio[13])为5.74 dB。而真实声源位于(5 500 m, 79 m)附近, 虽然CMFP对深度的估计在误差范围内, 但距离误差太大, 远大于400 m, 明显定位错误。
由图 4b)可知LSMFP的定位结果比真实的目标位置近且浅, LSMFP确定的目标位置为(5 250 m, 72.2 m), 与真实声源的位置相比, 距离方向误差约150 m, 深度方向误差约6.8 m, 整体误差处于系统允许误差范围之内, 认为定位正确。而且LSMFP的SINR约为4.15 dB, 比CMFP大约0.51 dB, 表明LSMFP更易于和伪峰区分; LSMFP的PBR约为6.35 dB, 比CMFP大约0.61 dB, 表明LSMFP更易于从背景中识别。
对10组数据的处理结果基本相同, 都如图 4所示:CMFP错误定位到了(8 200 m, 89 m)处, 而LSMFP可正确定位。图 5是LSMFP的距离和深度定位切片, 从图中也可看出声源距离约为5 250 m, 深度约为72.2 m。深度方向主瓣较明显, 即对深度的估计更容易。CMFP定位错误, 因此未绘制出定位切片。图 6是LSMFP对整个10 min数据的处理结果, 从图中可看出在10 min内LSMFP的定位基本一致, 但不同时间定位结果稍有不同。

|
| 图 5 LSMFP的距离和深度切片图 |

|
| 图 6 LSMFP处理器10 min的定位结果 |
图 7是CMFP和LSMFP在真实声源位置处的峰值背景比的对比图, 从该图可看出:LSMFP的PBR最大约为7.1 dB, 最小约为6.3 dB; CMFP的PBR最大约为5.7 dB, 最小约为5.3 dB, LSMFP比CMFP的PBR大0.6~1.7 dB。该图也表明:LSMFP的目标比CMFP更易于从背景中辨识出来。由于输出信干比SINR衡量的是主瓣和性能, 而CMFP定位失效, 因此不进行分析。总之, 以上结果都表明: LSMFP可以正确计算出浅海声源的位置参数, 且具有优于CMFP的性能。

|
| 图 7 CMFP和LSMFP在真实声源位置处的PBR对比 |
本文针对匹配场处理易受环境扰动和噪声影响的缺点展开讨论, 利用最小范数意义下的最小二乘算法对环境扰动和噪声进行了约束, 构造了基于最小二乘算法的匹配场处理器LSMFP, 并利用海试数据对本文算法进行了验证, 得到以下结论:① LSMFP具有优于CMFP的定位性能, 环境扰动和噪声对该算法的影响更小; ② LSMFP把环境扰动带来的影响引入到对模态深度矩阵的估计中, 因此, 该算法也可抵消部分阵元位置误差, 但本文未进行深入讨论; ③ LSMFP算法的本质是用最小二乘算法对环境扰动和噪声进行了抑制, 是一种类似于子空间算法的处理方法, 却不需要明确区分信号子空间和噪声子空间; ④ 该算法对噪声的处理思路可用在匹配场反演和时间反转处理器等方法上。
| [1] | Kuperman W A. An Overview of Beamforming Matched-Field Processing and Time Reversal Techniques[J]. The Journal of the Acoustical Society of America, 2016, 139(4): 2081-2081. |
| [2] | Dong H, Badiey M, Chapman R. Matched Mode Geoacoustic Inversion of Broadband Signals in Shallow Water[J]. The Journal of the Acoustical Society of America, 2015, 137(4): 2390-2390. |
| [3] |
马远良, 鄢社锋, 杨坤德. 匹配场噪声抑制:原理及对水听器拖曳线列阵的应用[J]. 科学通报, 2003, 48(12): 1274-1278.
Ma Yuanliang, Yan Shefeng, Yang Kunde. Matched Field Noise Suppression:Principle and Application with Towed Hydrophone Array[J]. Chinese Sci Bull, 2003, 48(12): 1274-1278. DOI:10.3321/j.issn:0023-074X.2003.12.009 (in Chinese) |
| [4] | Lee N, Richmond C D, Kmelnitsky V. Mean Squared Error Performance of Adaptive Matched Field Localization under Environmental Uncertainty[C]//Statistical Signal Processing Workshop, 2012:812-815 |
| [5] | Baggeroer A B, Kuperman W A, Mikhalevsky P N. An Overview of Matched Field Methods in Ocean Acoustics[J]. IEEE Journal of Oceanic Engineering, 1993, 18(4): 401-424. DOI:10.1109/48.262292 |
| [6] | Gemba K L, Hodgkiss W S, Gerstoft P. Adaptive and Compressive Matched Field Processing[J]. The Journal of the Acoustical Society of America, 2017, 141(1): 92-103. DOI:10.1121/1.4973528 |
| [7] | Woojae S, Sung-Hoon B. Robust Matched Field-Processing Algorithm Based on Feature Extraction[J]. IEEE Journal of Oceanic Engineering, 2002, 27(3): 642-652. DOI:10.1109/JOE.2002.1040947 |
| [8] | Teyan C, Chunshan L, Zakharov Y V. Source Localization Using Matched-Phase Matched-Field Processing with Phase Descent Search[J]. IEEE Journal of Oceanic Engineering, 2012, 37(2): 261-270. DOI:10.1109/JOE.2011.2181269 |
| [9] | Porter M B, Tolstoy A. The Matched Field Processing Benchmark Problems[J]. Journal of Computational Acoustics, 1994, 2(3): 161-185. DOI:10.1142/S0218396X94000129 |
| [10] | Yang T C. Data-Based Matched-Mode Source Localization for a Moving Source[J]. The Journal of the Acoustical Society of America, 2014, 135(3): 1218-1230. DOI:10.1121/1.4863270 |
| [11] | Golub G H, Van Loan C F. An Analysis of the Total Least Squares Problem[J]. SIAM Journal on Numerical Analysis, 1980, 17(6): 883-893. DOI:10.1137/0717073 |
| [12] |
王奇, 王英民, 苟艳妮. 前后向平均匹配场处理[J]. 西北工业大学学报, 2014, 32(4): 593-598.
Wang Qi, Wang Yingmin, Gou Yanni. A Matched Field Processor Using Forward/Backward Averaging Algorithm[J]. Journal of Northwestem Polytechnical University, 2014, 32(4): 593-598. (in Chinese) |
| [13] |
赵航芳, 李建龙, 宫先仪. 不确实海洋中最小方差匹配场波束形成对环境参量失配的灵敏性分析[J]. 哈尔滨工程大学学报, 2011, 32(2): 200-208.
Zhao Hangfang, Li Jianlong, Gong Xianyi. Sensitivity of Minimum Variance Matched-Field Beamforming to an Environmntal Parameter Mismatch in an Uncertain Ocean Channel[J]. Journal of Harbin Engineering University, 2011, 32(2): 200-208. (in Chinese) |
