

可展结构因其在运输过程中具有体积小、空间利用率大、可由收缩状态展开成预先设定的展开状态并保持稳定构型的特点, 而在航空、航天和建筑等领域具有广泛的应用前景[1]。剪式铰(scissor-like element)是目前应用最为广泛的一种可展结构。它由2个基本杆件经由销轴连接, 具有运动收缩功能。2个杆件可以绕着销轴自由转动, 但其余方向的自由度被约束。将剪式单元按照不同方式进行组合可以演变为多种典型的可展结构, 如空间伸展臂、太阳帆板、球面网格体系等。
近年来, 随着航天科技的竞争愈发激烈, 对结构的运动学精度和稳定性要求越来越高, 各研究机构和学者都投入了大量精力研究可展结构的相关特性[2-5]。Li等[2]提出了一种新的稳定性模型用于计算平面可展结构的失稳载荷。该模型有助于提高结构计算效率, 可选择合适的参数增大结构的失稳条件。Li等[3]基于非线性刚度系数提出了一种新的混合接触力模型精确地预测可展结构的动力学特性。Chen等[4]从空间机构运动学的基础理论出发, 提出了一种全新的厚板折纸理论模型。该模型将多自由度的零厚度折纸模型转化成单自由度的厚板折纸模型, 有效地简化了结构的驱动与控制。
在实际机构的运动过程中, 间隙是不可避免的, 铰链处的间隙更是影响机构运动精度与稳定性的重要来源。Yan等[5]以及Flores等[6]关于间隙对结构动力学特性的影响做了深入研究。但关于不同间隙铰链间的动力学相互作用并没有明确的阐述。在真实结构中, 每个铰链处都是具有间隙的, 所以不同位置处间隙铰链的相互作用是不可避免的。基于此, 本文以平面剪式可展结构为研究对象, 在其运动副中引入间隙, 并分别采用Gonthier接触力模型和LuGre摩擦模型建立了接触体之间的法向和切向接触力。最后, 通过建立的剪式机构动力学模型, 综合地分析了不同位置处间隙铰链对结构动力学行为的影响, 为精确预测结构的动力学特性提供依据。
1 含间隙结构的数学模型单独一个剪式单元由2个连杆经销轴连接而成, 将各剪式单元沿x轴进行阵列, 相邻单元之间通过运动副相连, 可组成线性阵列结构, 两单元可展结构的模型及坐标系如图 1所示。

|
| 图 1 考虑间隙的剪式线性阵列可展机构 |
AC和MD(CF、DN杆相同)两杆之间可绕销轴B相互转动, MD杆铰接在固定点M处, AC杆铰接于点A处, 滑块具有沿My方向的自由度。铰链o1、o2分别将两杆长度等分, F点受水平横向载荷作用, F=100 N。在可展结构中, 铰链A和铰链D处具有间隙。为了清晰表示该间隙模型, 将连接关系进行局部放大, 如图 1所示。
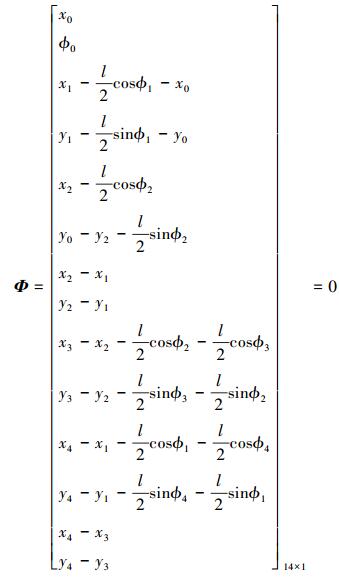
假设图 1中可展结构是刚体, 且此结构在平面内运动, 定义固定坐标系Mxy以及各构件连体坐标系o0x0y0~o4x4y4。连体坐标系的原点分别位于滑块和各杆件的质心处, 其中固定坐标系的矢量x与连体坐标系的矢量xi的正向夹角记为ϕi, 则构件的位姿可通过ϕi定义。设各构件i的广义坐标矢量为qi=[x, y, ϕ]iT, 则此剪式可展机构的广义坐标为

|
(1) |
在图 1中, 各构件的长度均为l。由于滑动副施加位置约束和角度约束在理想机构的滑块处, 所以滑块只有沿y轴的自由度。此外, 铰链M施加2个绝对约束在杆2上, 并且剩余的杆件都是铰链约束。因此, 在理想机构中, 剪式可展结构的运动约束方程为
|
(2) |
在真实铰链中, 转动间隙铰链在系统中引入2个额外的自由度, 即运动约束被去除而力约束被引入。在轴承和轴颈的非接触状态下, 轴颈在轴承中自由运动。然而在接触状态下, 产生的碰撞力将作为约束力限制轴颈的运动。在获得剪式机构运动约束方程的基础上, 一个多体系统的运动方程可以被表示为

|
(3) |
式中,M是质量矩阵, Φq是约束方程的Jacobian矩阵, 

(3) 式没有对位置和速度约束方程进行校正, 为了避免由此引起的约束违约问题, 本文采用一种新的几何约束法法进行处理。该方法与目前常用的Baumgarte法相比, 因直接对系统的广义坐标和广义速度进行修正, 可以确保将违约控制在给定的精度范围内[7]。
假设当t=ti-1时位置坐标为





|
(4) |
考虑位置约束方程的一阶变分δΦi=Φqδq并应用泰勒公式将(4) 式展开为

|
(5) |
当

|
(6) |
在未知量个数大于系统约束方程个数时, Φq不是方阵, 但可求得Φq的广义逆, 由(6) 式得

|
(7) |
将求得的δqi代入
图 2是多体系统中一般的间隙铰链模型。局部坐标系o1x1y1与杆1的质心固结, 点Pb与Pj分别为间隙关节处轴承和轴颈的回转中心, RB与RJ分别为轴承和轴颈的半径, Mxy表示全局坐标系。

|
| 图 2 剪式可展结构转动间隙铰链模型 |
在图 2中, rjP和rbP分别表示轴颈和轴承在全局坐标系中的位置, 则间隙矢量可以被描述为
|
(8) |
其中间隙矢量的模表述为
|
则其接触变形量为

|
(9) |
其中径向间隙c=RB-RJ。间隙关节元素间的接触状态由接触变形量δ确定。负值表示轴颈在轴承内自由运动, 正值表示接触体间相互碰撞或渗透。
在轴承和轴颈中的潜在接触点分别为Qb和Qj, 如图 3所示。在全局坐标系中, 潜在接触点的位置可以被描述为

|
| 图 3 可展结构在碰撞时的渗透深度 |

|
(10) |
式中,sj′Q表示轴颈质心到连接杆件质心间的距离。Aj表示从局部坐标系o1x1y1到全局坐标系Mxy之间的转换矩阵, n表示接触点间的法向矢量, 
|
(11) |
式中,“·”表示相对于时间的导数。
接触点在碰撞的法向和切向平面内的相对接触速度用vN和vt表示。相对接触速度可用于估计接触过程中的能量损失。它在碰撞的法向和切向的投影可被描述为
|
(12) |
其中切向矢量t为法向量n逆时针旋转
文献[8]研究了Hertz接触理论从单纯的弹性接触到考虑接触能量耗散的非线性接触力模型的发展历程, Hertz接触理论的不断完善其最终目的是为了精确地描述接触体之间的力学关系, 提高接触力模型在多体系统动力学分析中的精度。其中Lankarani-Nikravesh接触力模型在多体系统中的应用最为广泛。但由于在其数学推导过程中选择了较高的恢复系数导致该模型的使用范围受限于恢复系数和材料的选择。此外, Lankarani-Nikravesh模型认为在碰撞过程中由材料内部阻尼力做功引起的能量损失远小于法向接触力做功引起的弹性势能。因此, Lankarani和Nikravesh近似地认为在碰撞的压缩阶段和恢复阶段接触变形速度是相等的, 即在压缩阶段和恢复阶段能量的损失也是近似相等的。另一方面, 该模型主要适用于接触面小于接触体体积的碰撞。
针对上述模型的不足, 本文选用Gonthier接触力模型进行求解。该接触力模型不仅能得到准确的数值解, 更可同时适用于软材料和硬材料的接触, 并在较大面积的接触中结果更好[9]
|
(13) |
式中, δ和


|
(14) |
式中,
一般的斜碰撞会导致接触体在切向发生相对运动产生摩擦现象, 为了描述该摩擦现象, 文中利用具有准确捕捉摩擦中黏滞与滑移现象的LuGre摩擦模型避免了接触体在碰撞过程中的能量增长。该摩擦模型不仅能准确捕捉Stribeck效应(在低速情况下摩擦力随着速度的增加而减小), 还包含了“Coulomb”摩擦、黏性摩擦、预滑动、可变静摩擦和摩擦滞后等摩擦模型的属性, 较其他摩擦模型更能体现真实的摩擦现象。基于LuGre摩擦模型计算接触体之间的动态摩擦力为

|
(15) |
有效摩擦系数为
|
(16) |
式中,Fn为法向接触力, σ0为鬃毛的刚度系数, σ1为微观阻尼系数, σ2为黏性摩擦系数, z为鬃毛的平均变形量, 该状态变量的微分方程为
|
(17) |
式中,μk为动态摩擦系数, μs为静态摩擦系数, νs为Stribeck速度, γ为指数参数, 一般取γ=2。
将(17) 式代入(16) 式中得到LuGre摩擦模型的瞬时摩擦系数。

|
(18) |
一旦瞬时摩擦系数μ确定以后, 就可获得接触体之间的切向摩擦力。该摩擦模型中的参数识别参见文献[10], 其中黏性摩擦系数σ2描述润滑的粘黏属性, 该研究对象为干摩擦, 即σ2=0。
3.3 广义力的转化在可展结构运动过程中, 由于间隙的存在, 在接触区域会产生碰撞力。为了真实模拟轴承和轴颈间的接触碰撞, 需要将产生的接触力转化到连接构件质心处, 从而将产生的碰撞力引入到方程(3) 中。
含间隙转动副的接触碰撞力可以表述为

|
(19) |
根据牛顿第三定律, 作用在轴颈和轴承上的力F1和F0互为作用力和反作用力。将产生的接触力分别向连接杆件的质心处转化, 产生的额外力矩可表示为
|
(20) |
式中, Fix和Fiy(i=0, 1) 分别是施加在运动副上的接触力在全局坐标系中沿x轴和y轴的投影。xiQ和yiQ v(i=0, 1) 分别是碰撞点在固定坐标系中沿x轴和y轴的投影。将(20) 式代入(3) 式中可用于判断下一步长中轴承和轴颈的接触状态。
4 数值计算假设图 1中各杆为均质直杆, 杆长均为566 mm, 质量为3.7 kg, 转动副关节处各元素的尺寸与属性参数如表 1所示。
| 轴套半径/mm | 10.0 | 泊松比 | 0.29 | |
| 恢复系数 | 0.7 | 密度/(g·cm-3) | 7.8 | |
| 杨氏模量/GPa | 206.8 | 幂指数n | 3/2 | |
| 轴套摩擦系数 | 0.13 | —— | —— |
为了明确剪式结构中含间隙转动副对机构动态特性的影响, 在间隙关节运动学模型的基础上, 根据公式(9) 分别判断铰链A和D中的轴套和轴颈是否接触。若接触, 则根据(13) 式和(15) 式分别计算法向和切向接触力, 再将接触力及其引起的额外力矩转化后添加到公式(3) 的Q中, 并根据公式(4)~(7) 完成位置和速度的校正; 若轴套和轴颈没有接触, 则直接由方程(3) 计算即可得到该步长内结构的动态参数。依次计算, 直到达到总的循环次数为止。
根据初始参数代入相关的物理量, 可得到考虑2个转动副间隙相互作用时剪式可展结构的动力学特性。图 4和图 5分析了当间隙铰链A和D具有相同的间隙尺寸时, 相对于理想机构, 杆件1质心处的动力学响应。

|
| 图 4 铰链A和D间隙同为0.2 mm时杆件1质心处加速度响应 |

|
| 图 5 铰链A和D间隙同为0.5mm时杆件1质心处加速度响应 |
当铰链A和D的间隙尺寸同为0.2 mm时, 在图 4a)和图 4b)中, 可以看出理想机构在水平力作用下连杆质心处的加速度曲线很光滑, 但考虑铰间间隙时, 加速度曲线出现明显的波动和不同的峰值, 并且幅值有较大变化, 说明含间隙转动副在该时刻发生了接触碰撞, 较大程度影响了机构的运动精度。当间隙尺寸由0.2 mm增加到0.5 mm时, 从图 5可以看出, 加速度响应的幅值增加, 并且接触碰撞时间被延长, 表明较大的间隙值使得机构的动力学性能更加恶化。
图 6和图 7分析了当间隙铰链A和铰链D具有不同的间隙尺寸时, 相对于理想机构, 杆件1质心处的动力学响应。

|
| 图 6 铰链A和D间隙分别为0.2 mm和0.5 mm时杆件1质心处加速度响应 |

|
| 图 7 铰链A和D间隙分别为0.5 mm和0.2 mm时杆件1质心处加速度响应 |
在图 6中, 铰链A和铰链D的间隙尺寸分别为0.2 mm和0.5 mm, 图 7则相反。由这两个图可以看出, 增大铰链A的间隙尺寸对杆件1质心的动力学响应影响更大。相对于图 6, 图 7中的加速度响应和碰撞力响应出现了更明显的高频振荡特性。同时可看出, 当2个铰链间隙尺寸不同时, 不同铰链间隙间的耦合对机构动力学性能的影响是不可忽视的。比较图 6和图 4、图 5可知, 图 6中的加速度明显小于图 4和5中的加速度, 表明仅增大铰链D的间隙尺寸, 对机构的动力学响应起到了抑制的作用。比较图 7和图 4、图 5可知, 图 7中的加速度明显大于图 4和5中的加速度, 表明仅增大铰链A的间隙尺寸, 对机构的动态响应起到了加强的作用。综合比较图 4至图 7可知, 当铰链D的间隙尺寸增加时, 机构的动力学特性更加稳定, 在工程中, 可以在铰链D上增加可调节间隙的控制器以增强机构的稳定性。
5 结论1) 基于接触-分离-碰撞过程, 建立了2个铰链间隙的数学模型。采用一种新的几何约束法完成了系统位置和速度的校正, 避免了由于违约系数的不合理取值导致的数值解在精确解附近的大幅振动。
2) 通过对可展结构两间隙铰链动力学特性的研究可知:不同间隙铰链间具有强烈的动力学相互作用。为了准确捕捉可展结构的动力学行为, 所有的铰链都应被描述为间隙铰链。
3) 本文建立的2个间隙铰链的数学模型较真实地反映了可展结构的动力学特性, 2个间隙铰链间耦合特性的研究可为增加可展结构的运动精度和稳定性提供基础, 并为后续考虑多个间隙铰链的动力学特性提供依据。
| [1] |
李博, 王三民, 袁茹, 等. 基于剪式线性阵列可展结构对称性的动力学分析方法研究[J]. 西北工业大学学报, 2015(4): 665-671.
Li Bo, Wang Sanmin, Yuan Ru, et al. Dynamics Analysis Method Study Based on Linear Array Deployable Structure Symmetry of Scissor-Like Element[J]. Journal of Northwestern Polytechnical University, 2015(4): 665-671. (in Chinese) |
| [2] | Li B, Wang S M, Zhi C J, et al. Analytical and Numerical Study of the Buckling of Planar Linear Array Deployable Structures Based on Scissor-Like Element under Its Own Weight[J]. Mechanical Systems & Signal Processing, 2016, 83: 474-488. |
| [3] | Li B, Wang S M, Yuan R, et al. Dynamic Characteristics of Planar Linear Array Deployable Structure Based on Scissor-Like Element with Joint Clearance Using a New Mixed Contact Force Model[J]. Journal of Mechanical Engineering Science, 2016, 230(18): 3161-3174. DOI:10.1177/0954406215607903 |
| [4] | Chen Y, Peng R, You Z. Origami of Thick Panels[J]. Science, 2015, 349(6246): 396-400. DOI:10.1126/science.aab2870 |
| [5] | Yan S Z, Zhang L, Shen Y S. Dynamic Analysis of Deployable Structures with Clearance Connections[C]//Proceedings of International Conference on Mechanical Engineering and Mechanics, NanJing, China, 2005:637-641 |
| [6] | Flores P, Lankarani H M. Dynamic Response of Multibody Systems with Multiple Clearance Joints[J]. Journal of Computational and Nonlinear Dynamics, 2012, 7(3): 031003. DOI:10.1115/1.4005927 |
| [7] | Yoon S, Howe R M, Greenwood D T. Geometric Elimination of Constraint Violations in Numerical Simulation of Lagrangian Equations[J]. Journal of Mechanical Design, 1994, 116(4): 1058-1064. DOI:10.1115/1.2919487 |
| [8] | Machado M, Moreira P, Flores P, et al. Compliant Contact Force Models in Multibody Dynamics:Evolution of The Hertz Contact Theory[J]. Mechanism and Machine Theory, 2012, 53: 99-121. DOI:10.1016/j.mechmachtheory.2012.02.010 |
| [9] | Gonthier Y, Mcphee J, Lange C, et al. A Regularized Contact Model with Asymmetric Damping and Dwell-Time Dependent Friction[J]. Multibody System Dynamics, 2004, 11: 209-233. DOI:10.1023/B:MUBO.0000029392.21648.bc |
| [10] | Muvengei O, Kihiu J, Ikua B. Dynamic Analysis of Planar Multi-Body Systems with LuGre Friction at Differently Located Revolute Clearance Joints[J]. Multibody System Dynamics, 2012, 28(4): 369-393. DOI:10.1007/s11044-012-9309-8 |
