

2. 航天飞行动力学技术国家级重点实验室, 陕西 西安 710072
自由飘浮空间机器人系统不仅自由度多, 而且各关节运动与飘浮基座之间相互干扰、关节运动存在摩擦、外界存在干扰等, 因此属于一类非线性不确定性系统[1], 致使传统的PID控制无法满足机器人精细操作的要求。为此, 有必要研究更加符合自由飘浮空间机器人系统特性的先进控制方法。
智能控制方法已经在非线性不确定性系统中得到了广泛应用, 也有不少学者将智能方法应用于空间机器人的控制中[2-3]。Newton等设计了一种神经网络实时在线学习控制方法, 通过学习训练来调整神经网络的权值以及阈值, 修正机器人的前馈动力学模型, 使系统的实际输出越来越接近目标输出。Feng等[4]提出了一种鲁棒神经网络控制方法, 利用径向基神经网络对系统参数进行在线调整以补偿模型的不确定项, 但当模型中自由度较多时, 系统矩阵维数增加, 导致运算量增大计算耗时较长。Sanner等[5]结合神经网络控制与变结构控制的优点, 设计了机器人神经网络滑模控制方法, 并对其稳定性进行了证明。郭益深和陈力[6-7]设计了径向基神经元网络的关节运动自适应控制算法, 无需线性化动力学方程。封保民等[8]基于径向基神经网络设计了自由漂浮空间机器人在任务空间中的轨迹跟踪控制器, 提出了基于耗散理论的鲁棒控制器, 用于抑制跟踪累积误差和参数不确定的影响, 避免了对动力学模型参数线性化的要求, 但其径向基神经网络各参数的初始值是通过对系统的标称模型进行粗略学习之后得到的, 影响系统实时性。
虽然大多文献都考虑了参数的不确定性, 但对于实际运行过程中的非参数不确定性 (如关节的摩擦或因目标的捕获而改变末端负载的情况) 影响还有待深入研究。为此, 本文基于工作空间中的机器人模型, 考虑不确定性干扰对系统的影响, 基于神经网络在线建模技术, 提出并设计了自适应神经网络控制算法。
1 工作空间中机器人动力学模型空间机器人具有一定的工作空间, 只有当目标进入机械臂的可达工作空间后, 机械臂才开始按期望的路径运动, 并进行相应操作。因此, 直接在工作空间中设计控制算法更符合工程实际。
一般地, 空间机器人运动学方程可以写为

|
(1) |
式中,
将空间机器人的运动学方程对时间求导可以得到机械臂末端状态向量对时间的二阶导表达式

|
(2) |
空间机器人关节空间的动力学方程为

|
(3) |
式中,τ为关节力矩, 

|
(4) |
H(q) 为对称正定的惯性矩阵, 其表达式为

|
(5) |
式中,Hb为基座惯性矩阵, Hbm为基座与空间机械臂之间的耦合惯量矩阵, Hm表示空间机械臂基座坐标系与惯性坐标系重合时 (即基座固定于地面时) 机械臂的惯性矩阵。
给 (3) 式左乘Jg-T, 并将 (2) 式带入, 可以得到空间机器人在工作空间中的动力学方程

|
(6) |
式中
|
与关节空间类似, 工作空间动力学方程各项参数具有以下特性:
1) 惯性矩阵Hx(q) 对称, 正定且有界;
2) 矩阵
若考虑外部干扰, 则 (6) 式变为

|
(7) |
式中, fdist代表外部干扰力和力矩。
2 基于名义模型的控制律设计假设xed是xe的期望状态, 则空间机器人系统误差可以定义为e=xe-xed, 误差变化率为



|
(8) |
式中,Kp、Kv为比例微分控制律中的增益矩阵。
则由 (8) 式得
|
(9) |
带入 (6) 式得

|
(10) |
(10) 式即为模型精确时所设计的控制器。
3 模型不确定性的影响然而实际系统存在许多不确定因素, 如关节低速运动时受到的摩擦力, 或燃料消耗引起的质量变化等。这些不确定因素会导致无法精确得到实际模型, 即无法得到精确的Hx(q) 和
若采用空间机器人各项动力学参数的估计值代替其精确值, 得到的模型称之为名义模型。这里以Hx0(q) 表示名义模型的惯量矩阵, 以

|
(11) |
考虑外部干扰力和力矩, 将 (11) 式代入 (7) 式, 可以得到

|
(12) |
令

|
(13) |
比较 (13) 式和 (7) 式可见, 若名义模型与系统精确模型存在误差, 即ΔH、ΔC不为零, 则 (13) 式右端不等于零, 模型不精确会影响系统的性能。因此, 需要采取一定的方法对模型中存在的不精确部分进行逼近, 使其与实际系统一致。
4 自适应神经网络控制器设计径向基神经网络具有局部逼近特性, 因此本文采用径向基神经网络对模型的不精确部分进行逼近。
径向基神经网络结构如图 1所示, 它具有3层前馈网络, 即输入层、隐含层和输出层。信号由输入层传递至各隐含层节点, 经隐含层的映射函数处理后经过加权传递至输出层, 其中x1, x2, …, xn为输入信号, y1, y2, …, yn为输出信号。

|
| 图 1 径向基神经网络结构示意图 |
一般地, 隐含层中的作用函数可以采用如下的高斯函数

|
(14) |
式中, ci为中心向量, 反映了第i个高斯基函数的映射范围。bi为宽度向量, 反映了第i个高斯基函数的灵敏度。φi为第i个高斯函数的输出。
若再定义神经网络权值为
|
则径向基神经网络的输出为

|
(15) |
式中
令 (13) 式中等号右边的项为模型的不精确部分f(x), 则

|
(16) |
采用径向基神经网络对不确定部分f(x) 进行逼近时, 设最优权值为W*, 基函数中心矢量最优值为c*, 基函数宽度最优值为b*, 令w*=1/b*, 则神经网络的理想逼近为

|
(17) |
式中, 
根据神经网络的逼近能力, 假设:
假设1 最优权值及网络参数W*、c*、w*均有界, 即存在正常数, 满足‖W*‖≤WM, ‖c*‖≤cM, ‖w*‖≤wM。
假设2 对任意一个给定的正数εM, 总能找到最优权值及网络参数W*、c*、w*, 使得神经网络的逼近误差ε满足
设
|
(18) |
式中,
定义

|
(19) |
则神经网络的建模误差为

|
(20) |
基于对不确定部分f的估计输出

|
(21) |
(21) 式是考虑不确定项影响之后的补偿控制项, 结合 (11) 式, 系统控制律设计为
|
(22) |
式中,Fx为针对名义模型设计的控制项, FNN为神经网络自适应补偿控制项。控制系统结构图如图 2所示。

|
| 图 2 控制系统结构图 |
将 (22) 式代入 (7) 式, 可以得到
|
(23) |
等式两边分别减去
|
(24) |
于是有
|
(25) |
利用 (16) 式、(25) 式可以写为

|
(26) |
取状态量

|
(27) |
式中
|
相应系统的李雅普诺夫方程为

|
(28) |
由 (28) 式可知, 若给定Q正定, 则系统稳定。此时对称正定矩阵P=lyap (AT, Q)。
基于以上误差方程和李雅普诺夫方程, 设计网络权值估计值的变化率为

|
(29) |
式中γ>0, β>0。
则网络权值估计值可以通过对 (29) 式积分得到

|
(30) |
于是神经网络自适应控制项的具体表达式为

|
(31) |
由于
|
(32) |
式中
因此状态方程可以写作

|
(33) |
定义李雅普诺夫函数为

|
(34) |
由于

|
则
|
(35) |
把 (29) 式代入上式可得
|
(36) |
设qmin和pmax分别为矩阵Q的最小特征值和P最大特征值, 并利用假设1, 可以得到
|
(37) |
当满足条件

|
(38) |
时, 得到收敛条件

|
(39) |
因此, 只要选择合适的参数, 使其满足 (39) 式的收敛条件, 则有
为了验证本文方法的有效性, 以自由漂浮7关节空间机器人为对象进行仿真。机械臂构型参考加拿大二号机械臂, 如图 3所示。

|
| 图 3 7关节机械臂构型 |
选取基座质心初始时刻的位置为惯性参考系OI-xIyIzI的原点, 基座的连体坐标系O0-x0y0z0原点O0取在基座质心处, 坐标轴与其惯量主轴方向一致。假定初始状态下基座的连体坐标系和惯性坐标系是重合的。系统的物理参数如表 1所示, 机械臂的Denavit-Hartenberg参数如表 2所示。
| 编号 | 质量 /kg | 长度 /m | 主惯量矩 | ||
| Ixx /(kg·m2) | Iyy /(kg·m2) | Izz /(kg·m2) | |||
| 0 | 5 000 | 6 | 3 000 | 6 000 | 4 000 |
| 1 | 20 | 0.35 | 2 | 2 | 3 |
| 2 | 20 | 0.35 | 2 | 2 | 3 |
| 3 | 40 | 4 | 1 | 40 | 40 |
| 4 | 40 | 4 | 1 | 40 | 40 |
| 5 | 20 | 0.35 | 2 | 2 | 3 |
| 6 | 20 | 0.35 | 2 | 2 | 3 |
| 7 | 40 | 1.2 | 10 | 8 | 4 |
| ai-1/m | ai-1/(°) | ai/m | qi/(°) |
| 0 | 0 | 4.2 | q1 |
| 0 | 90 | 0.35 | q2 |
| 0 | 90 | 0.35 | q3 |
| 4 | 0 | 0 | q4 |
| 4 | 0 | 0.35 | q5 |
| 0 | 90 | 0.35 | q6 |
| 0 | 90 | 1.2 | q7 |
系统初始条件如下, 各关节初始角度、角速度、机器人基座位置均为零, 机器人基座初始姿态ω0为
|
末端执行器的初始位置pe0和初始姿态ωe0分别为
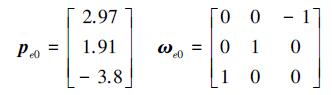
|
末端执行器期望的位置和速度为
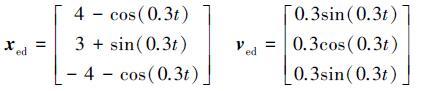
|
假设系统中只有前3个关节有扰动, 其余关节扰动为零, 取:
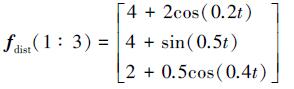
|
并假设在t=10 s时机械臂抓捕上目标体, 目标体质量随时间变化规律未知。在仿真中仅考虑对机械臂末端位置的控制, 忽略角度的控制, 控制参数取

|
取神经网络中心矢量和基函数宽度分别为
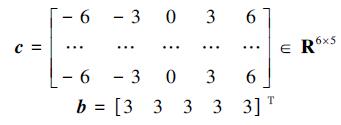
|
采用本文所设计的自适应神经网络控制算法, 仿真得到机械臂末端对期望轨迹的跟踪曲线如图 4所示。

|
| 图 4 神经网络控制下的轨迹跟踪 |
为了对比, 也采用传统PID控制进行了仿真, 轨迹跟踪曲线如图 5所示。机械臂末端执行器对期望轨迹的跟踪误差如图 6~图 8所示。

|
| 图 5 PID控制下的轨迹跟踪 |

|
| 图 6 机械臂对期望轨迹的跟踪误差 (x方向) |

|
| 图 7 机械臂对期望轨迹的跟踪误差 (y方向) |

|
| 图 8 机械臂对期望轨迹的跟踪误差 (z方向) |
由以上曲线可以看出, PID控制和自适应神经网络控制在开始阶段时, 都能够使位置跟踪误差逐渐收敛至零。但在第10 s第7关节质量突变后 (抓取目标后), PID控制由于缺乏鲁棒性, 位置跟踪误差出现波动且呈发散趋势。而自适应神经网络控制位置误差尽管在第10 s时有一个小的波动, 但是, 经过短暂的调节, 依然能够保持收敛。可见, 即使在有未知扰动的影响下, 神经网络的学习能力能够使系统依然跟踪上期望轨迹。
6 结论本文针对自由漂浮空间机器人存在模型不确定性和外界干扰的情形, 在工作空间中设计了自适应神经网络控制器。该控制器利用径向基神经网络对模型中的未知项进行逼近, 并结合系统误差和误差变化率给出了基于李雅普诺夫方程的权值及网络参数调整律。仿真结果表明本文设计的自适应神经网络控制器, 在机械臂末端有干扰和负载的情况下, 也能向期望轨迹靠拢, 并在一定误差范围内保持收敛, 相比于传统PID控制器, 性能更优。
| [1] | Yoshida K, Nenchev D, Ishigami G, et al. Space Robotics[M]. The International Handbook of Space Technology, Springer Berlin Heidelberg, 2014:541-573 |
| [2] | Flores-Abad A, Ma O, Pham K, et al. A Review of Space Robotics Technologies for On-Orbit Servicing[J]. Progress in Aerospace Sciences, 2014, 68(8): 1–26. |
| [3] | Newton R Todd, Xu Yangsheng. Neural Network Control of a Space Manipulator[J]. IEEE Control Systems, 1993, 13(6): 14–22. DOI:10.1109/37.247999 |
| [4] | Feng B, Ma G, Xie W, et al. Robust Tracking Control of Space Robot via Neural Network[C]//20061st International Symposium on Systems and Control in Aerospace and Astronautics, 2006:902-906 |
| [5] | Sanner R M, Slotine J J E. Stable Adaptive Control of Robot Manipulators Using "Neural" Networks[J]. Neural Computation, 1995, 7(4): 753–790. DOI:10.1162/neco.1995.7.4.753 |
| [6] |
郭益深, 陈力.
漂浮基姿态受控空间机械臂关节运动的自适应神经网络控制[J]. 空间科学学报, 2008, 28 (2): 173–179.
Guo Yishen, Chen Li. Adaptive Neural Network Control of Free-Floating Space Manipulator with an Attitude Control Base[J]. Chinese Journal of Space Science, 2008, 28(2): 173–179. (in Chinese) |
| [7] |
陈力.
参数不确定空间机械臂系统的鲁棒自适应混合控制[J]. 控制理论与应用, 2004, 21 (4): 512–516.
Chen Li. Robust and Adaptive Composite Control of Space Manipulator System with Uncertain Parameters[J]. Control Theory & Applications, 2004, 21(4): 512–516. (in Chinese) |
| [8] |
丰保民.自由漂浮空间机器人轨迹规划与轨迹跟踪问题研究[D].哈尔滨:哈尔滨工业大学, 2007
Feng Baomin. Study on Path Planning and Trajectory Tracking Control of Free-Floating Space Robot[D]. Harbin, Harbin Institute of Technology, 2007(in Chinese) |
2. National Key Laboratory of Aerospace Flight Dynamics, Xi'an 710072, China
