

2. 空军工程大学 防空反导学院, 陕西 西安 710051
随着现代战争中电子对抗的愈加激烈, 雷达的生存环境变得十分恶劣, 单部雷达难以与电子对抗系统展开全面抗衡[1]。雷达组网能够发挥多部雷达数据融合的优势, 利用不同雷达中真实目标量测的同源性, 对欺骗干扰进行有效识别。但针对雷达组网的航迹欺骗干扰也应运而生[2-6]。目前, 研究多是从产生虚假航迹的干扰机入手, 通过多架电子战飞机(ECAV)同时对各组网雷达进行协同欺骗干扰, 使不同雷达中的虚假目标具有较强的空间相关性, 给干扰识别带来了很大难度, 因此, 虚假航迹的鉴别成为雷达抗干扰方法中一项重要研究内容。文献[2]简单论述了抗航迹欺骗干扰技术, 但这些技术需要依靠操作人员的经验进行筛查。文献[7-11]在研究虚假航迹形成原理的基础上, 通过公式推导得到真假航迹的统计特性存在差异, 最后采用假设检验理论鉴别虚假航迹。例如:文献[7]利用虚假航迹生成过程中ECAV编队引入的随机误差的均值和方差参量, 构造量测误差方差阵进行检验, 实现虚假航迹鉴别; 文献[8]针对航迹欺骗干扰、杂波剩余假航迹干扰等能够形成航迹的虚假目标, 从回波频谱分析角度着手, 综合航迹速度修正处理, 实现虚假航迹鉴别。文献[9]利用坐标差的协方差对角化和归一化处理构造检验样本, 最后利用似然比统计检验的方法实现虚假航迹的鉴别。文献[10]采用卡尔曼滤波对虚假航迹进行跟踪, 并在跟踪的过程中提取归一化新息平方, 利用统计假设检验实现雷达对航迹真实性的判决。文献[11]利用量测数据构造了样本的量测误差协方差阵, 建立假设检验模型, 最后利用M/N逻辑加强判决可靠性。虽然上述方法取得了较好的结果, 但仍存在2个不足:①上述方法均假设随机误差服从均值为0、方差为σ2的高斯分布, 但在实际背景下随机误差的分布并不确定; ②时间样本容量的选取, 当时间样本容量比较大时, 航迹的正确鉴别率较高, 但计算量较大; 反之, 虽然计算量减少, 但虚假航迹的正确鉴别率较低。
本文认为:通过雷达网在部分时间样本内的测量值鉴别虚假航迹, 这属于部分信息已知、部分信息未知的情形, 这与灰色系统理论的研究范畴相近。灰色系统是信息不完全或不完全确定的系统, 是我国著名学者邓聚龙教授1982年创立的。灰色系统理论是利用已知信息来确定系统的未知信息, 使系统由灰变为白的过程, 它能够处理小样本、贫信息系统。因此, 本文采用灰色系统理论设计虚假航迹的鉴别方法。
1 虚假航迹的形成原理文献[11]给出了虚假航迹的形成原理, 如图 1所示。假设雷达网由3部雷达R1、R2、R3所组成, 电子战飞机编队由3架无人机E1、E2、E3所组成。ECAV事先获知了雷达网的战术布局, 在雷达网对监视区进行探测的过程中, 它们截获各雷达发射的电磁脉冲, 通过时间延迟以及相互之间的协同控制, 使得各自转发的距离虚假目标在t1时刻的位置巧妙重合到t1处; 在t2时刻形成虚假目标t2, 各个时刻的虚假目标相关联最终形成虚假航迹L。

|
| 图 1 形成虚假航迹示意图 |
通过上述分析可知, 利用ECAV编队对雷达网进行航迹欺骗干扰, 需要满足以下条件:1)需要获取雷达网中的各个雷达的地理位置、工作参数等信息, 从而引入了雷达站观测误差; 2)在ECAV编队进行协同干扰过程中, 由于干扰信息调制和协同控制等环节, 也将引入误差, 称为协同误差。因此, ECAV编队在设计虚假航迹过程中, 必将引入雷达站观测误差和协同误差两部分误差。
2 算法基本思路及设计 2.1 算法基本思路图 2是真实航迹下3部雷达R1、R2、R3的观测示意图。

|
| 图 2 真实航迹下的3部雷达侦测示意图 |
从图 2可以看出:3部雷达获得目标的坐标分别为(xi, yi)(i=1, 2, 3), 当目标T处于真实航迹上时, 由于雷达测量误差, 导致横坐标上有x1≈x2≈x3, 纵坐标上有y1≈y2≈y3与目标所在的真实坐标(xT, yT)近似, 它们之间的相关性较高。
图 3是虚假航迹下3部雷达的观测示意图, 从图 3可以看出:目标T是经电子战飞机根据雷达所处位置和电子战协同作用下产生的虚假目标, 位于虚假航迹上, 由于受到雷达站测量误差和协同误差的影响, 导致不同的电子战飞机设计的虚假目标的坐标不同, 假设3部电子飞机设计的虚假目标分别为t1, t2, t3, 在二维平面上, 它们的坐标分别是(xT1, yT1), (xT2, yT2), (xT3, yT3)。当第i部雷达检测目标Ti时, 它测出的结果与目标Ti的坐标差别较大, 使得3部雷达测得的数据误差较大, 其相关性较低。

|
| 图 3 虚假航迹下的3部雷达侦测示意图 |
设有n部雷达Rk(k=1, 2, …, n), 它们的实际坐标分别为(XRk, YRk), 时间样本容量为m, 记第i时刻点为ti(i=1, 2, …, m)。当目标处于真实航迹时, n部雷达测出目标在时间样本下的测量值间的关联度较大; 当目标处于虚假航迹时, n部雷达测出目标在时间样本下的测量值间的关联度较小。本文采用灰色关联度计算雷达间测量的关联度, 以此作为区分真假目标的依据。
2.2 灰色关联度灰色关联分析是灰色系统理论的重要组成部分, 其基本思想是以几何关系或曲线的相似程度来度量因素间的关联程度, 它对实验样本数量没有要求, 不需要样本具备典型的分布规律, 计算量小, 其整体比较机制使得它能以较强的分辨力研究系统的各种复杂关系, 具体计算步骤如下:
1) 确定参考序列和比较序列
确定参考序列x0=(x0(t1), …, x0(tm))和比较序列xk=(xk(t1), …, xk(tm))。
2) 计算比较序列xk与参考序列x0之间的灰色关联系数ξ0k(ti)
|
(1) |
式中, ε∈[0, 1]为分辨系数, 集合T={t1, …, tm}, 差异度0k(ti)=|x0(ti)-xk(ti)|。
3) 计算比较序列xk与参考序列x0之间灰色关联度R0k
|
(2) |
根据上述分析, 基于灰色系统理论的雷达网航迹欺骗鉴别方法的具体步骤如下:
步骤1 系统建模
在时刻ti(i=1, …, m)下, 第k(k=1, …, n)部雷达探测到目标的参数为(ri(k), ρi(k)), 则第k部雷达在时刻t1, t2, …, tm下的测量值构成序列Wx(k)和Wy(k)
| $ $ |
式中
|
式中, (XRk, YRk)为第k部雷达所处的坐标。
步骤2 计算第k部雷达和第j雷达所测参数向量的灰色关联度
应用公式(3)和公式(4)分别计算第k部雷达和第j部雷达关于x轴和y轴上测量值的灰色关联度Rkjx和Rkjy
|
(3) |
|
(4) |
式中, 
应用公式(5)计算第k部雷达和第j雷达所测参数向量的灰色关联度rkj

|
(5) |
步骤3 虚假航迹鉴别
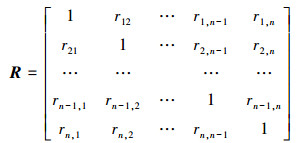
应用公式(5)计算两两雷达间的灰色关联度, 建立灰色关联矩阵R
|
显然, 灰色关联矩阵R为对称正定矩阵, 系统的总体关联度b为
|
(6) |
从上面分析可知:当航迹为真实航迹时, 系统总体关联度b较大; 当航迹为虚假航迹时, 系统总体关联度b较小。因此, 给定阈值T(0 < T < 1), 当b>T时, 表示该航迹为真实航迹; 否则该航迹为虚假航迹。
3 仿真分析 3.1 仿真初始条件不失一般性, 考虑3部两坐标雷达组网, 坐标分别为(0 km, 0 km)、(50 km, 0 km)、(120 km, 0 km), 3部雷达的测角误差标准差为0.1°, 测距误差标准差均为100 m, 雷达采样周期相同为1 s; 共有3部电子战飞机分别对3部雷达进行航迹欺骗干扰, 其中:ECAV1的起始位置坐标为(4.0×104 m, 5.398×104 m), 方向运动速度为-220 m/s, Y方向运动速度为-20 m/s; ECAV2的起始位置坐标为(6×104 m, 5.5×104 m), X方向运动速度为150 m/s, Y方向运动速度为30 m/s; ECAV3的起始位置坐标为(1.2×105 m, 5.7×104 m), X方向运动速度为150 m/s, Y方向运动速度为30 m/s; 3部ECAV引入的距离随机误差均为65 m, 角度随机误差均为0.057°; 虚假目标的航迹起始位置为(30 km, 100 km), 其中方向速度为380 m/s, Y方向速度为-20 0m/s, 雷达网对其跟踪200 s, 选取90~150 s, 共31个时刻的样本, 蒙特卡罗仿真次数为300次。
3.2 仿真结果与分析根据第3节的算法基本思路及流程可以看出:基于灰色系统理论的雷达网航迹欺骗鉴别方法与分辨系数ε∈(0, 1)的取值、样本容量、门限T(0 < T < 1)的取值有关。因此, 下面分别研究分辨系数ε、样本容量、门限T对虚假航迹正确鉴别率的影响。
1) 分辨系数ε对正确鉴别率的影响
令阈值T=0.75, ε=0.1, …, 0.9, 图 4给出分辨系数与虚假航迹正确分辨率的关系图。

|
| 图 4 分辨系数与正确分辨率间的关系图 |
从图 4可以看出:当分辨系数ε=0.5时, 虚假航迹的正确分辨率最大, 达到0.973 4;当ε=0.2, 0.3, 0.4, 0.6, 0.9时, 虚假航迹的正确率均高于0.96;当分辨系数ε=0.1, 0.7, 0.8时, 虚假航迹的正确率均高于0.95。平均的虚假航迹正确率为0.961 9, 相比其他算法具有一定的优势。
2) 样本容量对正确鉴别率的影响
令分辨系数ε=0.5, 阈值T=0.75, 样本容量与虚假航迹正确分辨率间的关系如图 5所示。

|
| 图 5 样本容量与虚假航迹正确分辨率间的关系图 |
从图 5可以看出:样本容量越大, 虚假航迹的分辨率越高, 虚假航迹的分辨率均在0.97以上。
3) 门限T对正确鉴别率的影响
令分辨系数ε=0.5, 样本容量为31, 阈值与虚假航迹的正确分辨率的关系见图 6所示。

|
| 图 6 阈值与虚假航迹正确识别间的关系 |
从图 6可以看出:当T=0.75时, 虚假航迹的正确率达到最大, 随着阈值T的增大, 虚假航迹的正确率在减少。这是因为:阈值T是用于衡量雷达网中各观测数据之间的相关性, 当阈值T过高时, 可能将正确航迹也被认为是虚假航迹, 出现误判; 当阈值T过低时, 使得虚假航迹的正确识别率较低, 从而导致对虚假目标的漏判。
4 结论本文以雷达组网为研究背景, 从虚假航迹形成原理出发, 针对雷达网在测量真假航迹时获得的测量序列相关性存在差异, 结合灰色分析理论, 提出了基于灰色系统理论的雷达网航迹欺骗鉴别方法, 并进行了仿真实验, 实验结果表明该方法较好地对虚假航迹进行鉴别。同时, 分析了分辨系数ε、样本容量、门限T对虚假航迹的影响, 对实际工程应用具有一定的理论指导意义。
| [1] |
周万幸.
一种新型极化抗干扰技术研究[J]. 电子学报, 2009, 37 (3): 454–460.
Zhou Wanxing. Research of a New Type Techniques for Anti-Interference Using Polarization[J]. Acta Electronica Sinica, 2009, 37(3): 454–460. (in Chinese) |
| [2] |
范振宇, 王磊, 苏建春.
多机协同控制下的航迹欺骗技术[J]. 信息与电子工程, 2010, 8 (3): 265–268.
Fan Zhenyu, Wang Lei, Su Jianchun. Technology of Track Deception for Cooperative Control of Multiple Electronic Combat Air Vehicles[J]. Information and Electronic Engineering, 2010, 8(3): 265–268. (in Chinese) |
| [3] | Keith B Purvis. Feasible Flight Paths for Cooperative Generation of a Phantom Radar Track[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, 2004:1167-1186 |
| [4] |
周续力, 张伟.
对组网雷达的多目标航迹欺骗[J]. 火力与指挥控制, 2008, 33 (6): 136–138.
Zhou Xuli, Zhang Wei. Multi-Target Track Deception against Radar Networking System[J]. Fire Control and Command Control, 2008, 33(6): 136–138. (in Chinese) |
| [5] |
孙龙祥, 赵波, 邱卫军, 等.
一种具有航迹特征的雷达假目标产生技术[J]. 雷达科学与技术, 2005, 3 (4): 198–202.
Sun Longxiang, Zhao Bo, Qiu Weijun, et al. A Technique for Generating the Radar's False Target with Signature of Flight Path[J]. Radar Science and Technology, 2005, 3(4): 198–202. (in Chinese) |
| [6] |
倪建春, 王宝.
有源欺骗干扰及雷达反对抗策略研究[J]. 舰船电子对抗, 2011, 24 (3): 5–8.
Ni Jianchun, Wang Bao. Research Into The Active Deception Jamming and Radar Counter-Countermeasure[J]. Shipboard Electronic Countermeasure, 2011, 24(3): 5–8. (in Chinese) |
| [7] |
孙殿星, 王国宏, 张翔宇.
基于多元统计分析理论的雷达网航迹欺骗鉴别方法[J]. 电子学报, 2014, 42 (9): 1680–1684.
Sun Dianxing, Wang Guohong, Zhang Xiangyu. Algorithm of Discriminating Phantom Track and Target Track for Radar Network Based on Multivariate Statistical Analysis Theory[J]. Acta Electronica Sinica, 2014, 42(9): 1680–1684. (in Chinese) |
| [8] |
王华彬, 徐牧, 王成, 等.
基于航迹速度修正频谱分析的防空雷达虚假目标判别方法[J]. 雷达学报, 2013, 2 (3): 382–388.
Wang Huabin, Xu Mu, Wang Cheng, et al. False Target Discrimination of Air Surveillance Radar Based on Track Velocity Modification and Frequency Spectrum Analysis[J]. Journal of Radars, 2013, 2(3): 382–388. (in Chinese) |
| [9] |
孙殿星, 王国宏, 盛丹.
基于均值-方差联合检验的航迹欺骗干扰识别[J]. 航空学报, 2014, 35 (1): 1–13.
Sun Dianxing, Wang Guohong, Sheng Dan. Phantom Track Jamming Recognition Based on Mean-Covariance Collaborative Testing[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(1): 1–13. (in Chinese) |
| [10] |
吴健平, 王国宏, 孙殿星, 等.
基于新息检验的分布式雷达网虚假航迹鉴别[J]. 系统工程与电子技术, 2015, 37 (1): 67–72.
Wu Jianping, Wang Guohong, Sun Dianxing, et al. Phantom Track Discrimination Based on Inspection of Innovation in Distributed Radar Network[J]. Systems Engineering and Electronics, 2015, 37(1): 67–72. (in Chinese) |
| [11] |
吴健平, 王国宏, 孙殿星, 等.
集中式雷达网鉴别虚假航迹的假设检验方法[J]. 西安交通大学学报, 2015, 49 (2): 80–85.
Wu Jianping, Wang Guohong, Sun Dianxing, et al. A Hypothesis Testing Method for Phantom Track Discrimination in Centralized Radar Network[J]. Journal of Xi'an Jiaotong University, 2015, 49(2): 80–85. (in Chinese) |
2. Air and Missile Defense College, Air Force Engineering University, Xi'an 710051, China
