

五相永磁同步电机由于具有较高的效率、功率因数和密度、以及较强的容错能力, 广泛应用于机床、机器人、电动汽车、风力发电以及航空航天等对功率和可靠性有较高要求的应用场合[1-4]。在五相永磁同步电机驱动控制系统中, 常规的磁场定向控制策略需要通过固定在电机转轴上的光电编码器等位置传感器获得电机的转速和位置信息, 从而实现五相永磁同步电机的闭环控制。然而, 常规的位置传感器对振动条件和温度条件较为敏感, 从而降低了整个电机驱动控制系统的可靠性, 并限制了五相永磁同步电机在相对严苛环境条件下的应用[5]。
随着数字信号处理器技术的发展, 永磁同步电机无位置传感器控制技术在电机驱动控制研究领域得到了广泛关注[6]。永磁同步电机无位置传感器控制技术主要分为2类:①基于永磁同步电机凸极效应的高频信号注入法[7];②基于电机模型的观测器估计法[8]。高频信号注入法的缺点之一是, 所注入高频信号带来的噪声将导致电机驱动控制系统性能下降。而观测器估计法中的模型参考自适法[9]和卡尔曼滤波法[10]又较为依赖精确的电机模型。相比之下, 滑模观测器法由于其较强的鲁棒性、较为简单的算法实现以及相对独立于电机模型, 是一种较为有效的电机转速和转子位置估计方法, 并在三相永磁同步电机无位置传感器控制系统中得到了广泛应用。
在永磁同步电动机无位置传感器驱动控制系统中, 滑模观测器法一般在静止参考坐标系下, 通过滑模观测器得到定子相电流的估计值, 并与电流传感器采样得到的定子电流实测值进行比较, 得到定子相电流估计误差, 来获得反电势当量信号, 从而进一步估计电机的转子转速和位置。在常规滑模观测中, 一般利用符号函数作为观测器的开关函数, 来获得反电势的当量信号。然而, 由于符号函数的离散性, 常规滑模观测器中抖振现象严重, 且反电势当量信号中包含大量的高频振荡分量。因此, 在常规滑模观测法中, 往往需要利用低通滤波器对滑模观测器获得的反电势当量信号进行滤波, 得到转速和转子位置估计所需的反电势信号。但是, 低通滤波器的引入又会造成相位延迟, 使得常规滑模观测器不得不加入相位补偿模块, 从而使整个滑模观测器的结构更加复杂。为了解决这一问题, 文献[11]中提出了一种自适应滤波器方法, 但仍无法完全实现相位补偿。文献[12]中为了减小滑模抖振, 用饱和函数代替符号函数, 作为滑模观测器的开关函数, 然而, 由于饱和函数仍然是一种离散函数, 因此其滑模抖振现象依然较为明显。文献[13]中, 摒弃了常规滑模观测器所使用的符号函数和饱和函数, 利用sigmoid函数作为滑模观测器的控制函数, 由于该函数是连续函数, 因此滑模抖振明显减小。文献[14]设计了一种带自适应反电势观测器的滑模观测器, 消除了常规滑模观测器中的低通滤波器和相位补偿单元, 提高了电机转速和转子位置估计的精度。然而, 文献[13]和[14]中所提出的滑模观测器均是关于三相永磁同步电机无位置传感器驱动控制系统, 而对于五相永磁同步电机无位置传感器驱动控制系统, 为了实现较为精确的电机转速和转子位置观测, 三次谐波的影响将无法直接忽略, 滑模观测器中的三次谐波电流项必须考虑, 且在利用李雅普诺夫准则, 对观测器的稳定性和收敛性进行分析时, 三次谐波项也会对观测器的稳定性和收敛性条件造成影响, 使得五相永磁同步电机无位置传感器驱动控制系统中的滑模观测器设计更为复杂和困难。
本文在考虑三次谐波电压和电流的条件下, 提出一种基于自适应滑模观测器的五相永磁同步电机无位置传感器控制方法。该方法首先利用带三次谐波的五相永磁同步电机模型设计了滑模观测器, 并用sigmoid函数代替一般滑模观测器常用的符号函数作为电流观测器的开关函数, 以减小滑模抖动并获得更为准确的反电势当量信号。其次设计了反电势自适应观测器来估计电机转速和位置信号, 消除了常规无位置传感器控制系统中滑模观测器所必需的低通滤波器和相位补偿单元, 提高了转速和位置信号的估计精度。此外, 利用李雅普诺夫准则, 证明了所设计的滑模观测器和反电势自适应观测器的稳定性。
1 无位置传感器驱动控制系统基于自适应滑模观测器的五相永磁同步电机无位置传感器驱动控制系统原理框图如图 1所示。系统主要由五相永磁同步电机、电流闭环、转速闭环、空间矢量脉宽调制单元、坐标变换单元以及自适应滑模观测器构成。值得注意的是, 在五相永磁同步电机无位置传感器驱动控制系统中, 为了实现较为精确的电机转速和转子位置观测, 三次谐波的影响无法直接忽略, 在观测和控制基波电流和电压分量的同时, 三次谐波电压和电流也需要被观测和控制。

|
| 图 1 基于自适应滑模观测器的五相永磁同步电机无位置传感器驱动控制系统原理框图 |
从图 1可以看出, 在五相永磁同步无位置传感器驱动控制系统中, 用于观测电机转速和转子位置的自适应滑模观测器是实现无位置传感器控制的核心和基础。
图 2是所提出的自适应滑模观测器的原理框图。该观测器主要由滑模观测器和反电势自适应观测器构成, 在观测基波电流的同时还对三次谐波电流进行了观测。其中滑模观测器采用sigmoid函数, 代替常规滑模观测器中的符号函数, 作为观测器的开关函数。由于sigmoid函数是一个连续函数, 使得整个滑模观测器的滑模抖动现象明显减小, 同时, 在滑模观测器之后, 利用反电势自适应观测器来对反电势信号进行滤波和观测, 实现电机转速和转子位置的估计, 从而消除了低通滤波器和相位补偿模块, 使得整个滑模观测器的结构相对简单。

|
| 图 2 自适应滑模观测器原理框图 |
所提出的自适应滑模观测器主要由滑模观测器和反电势自适应观测器两部分构成, 因此, 观测器设计主要包括滑模观测器设计和反电势自适应观测器设计两部分。
2.1 滑模观测器设计为了构造五相永磁同步电机无位置传感器驱动控制系统的滑模观测器, 首先需要五相永磁同步电机在静止坐标系下的模型。考虑三次谐波的影响, 五相永磁同步电机静止坐标系α1-β1-α3-β3下的电压平衡方程如(1)式所示:

|
(1) |
式中, 下标α1、β1表示基波分量; α3、β3表示三次谐波分量; Rs为定子绕组阻值; [uα1 uβ1 uα3 uβ3]T是静止坐标系α1-β1-α3-β3下的定子电压矢量; [iα1 iβ1 iα3 iβ3]T是静止坐标系下的定子电流矢量; 对角阵diag (Lα1 Lβ1 Lα3 Lβ3)是静止坐标系下的定子电感矩阵; [eα1 eβ1 eα3 eβ3]T是静止坐标系下的反电势矢量。由于电机为表贴非凸极结构, Ld1=Lq1=Lα1=Lβ1, Ld3=Lq3=Lα3=Lβ3。
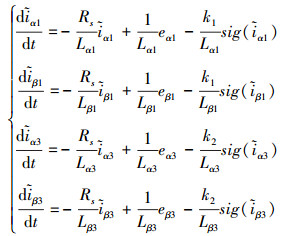
将(1)式转换为电流状态方程形式, 并根据相关的滑模变结构理论, 则考虑三次谐波的五相永磁同步电机滑模观测器设计如下:

|
(2) |
式中, 
|
(3) |
式中, a为sigmoid函数的斜率, 是一个可调正实数。
其后定义滑模面如(4)式所示:
|
(4) |
式中, [sα1 sβ1 sα3 sβ3]T为所定义的滑模面矢量; 
为了证明所设计滑模观测器的稳定性, 定义李雅普诺夫函数如(5)式所示:
|
(5) |
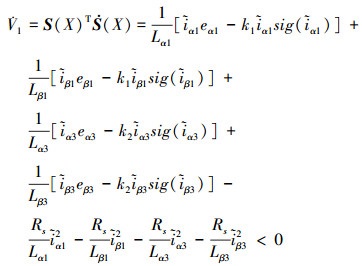
根据李雅普诺夫稳定性判据, 如果所设计的滑模观测器(2)稳定且收敛于滑模面S(X), 那么李雅普诺夫函数V1需同时满足如下2个条件:①李雅普诺夫函数V1正定; ②李雅普诺夫函数V1的导数为负数。由(5)式可以看出, 由于所定义的李雅普诺夫函数为静止坐标系α1-β1-α3-β3下定子电流估计误差平方和的形式, 显然满足条件①。那么只需要证明李雅普诺夫函数V1的导数为负数, 则可证明所设计滑模观测器的稳定性, 即
|
(6) |
式中, 


为了证明李雅普诺夫函数的导数为负数, 通过(2)式与(1)式转换的电流状态方程相减, 可以得到定子电流误差方程如(7)式所示:
|
(7) |
将(7)式代入(6)式, 滑模观测器李雅普诺夫函数的导数可表示如(8)式所示:
|
(8) |
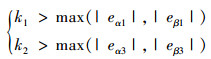
由于所有状态变量和电机参数均有界, 因此, 通过式(8)可以推导出所设计的五相永磁同步电机无位置传感器滑模观测器的收敛条件为
|
(9) |
只要满足(9)式的条件, 则可证明所设计滑模观测器的稳定性, 即选择合适的滑模增益k1和k2, 则可使滑模观测器稳定并收敛。
当滑模观测器系统达到滑模面时有

|
(10) |
将(10)式代入(7)式, 可得到电机反电势如下:

|
(11) |
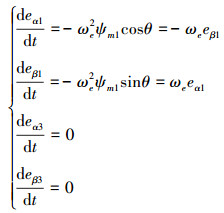
在一个电机转速和转子位置估计周期内, 由于电机角速度的变化率远小于定子电流的变化率, 因此可认为电机转子电角速度的导数
|
(12) |
式中, ωe是转子电角速度, θ是转子位置电角度, Ψm1是基波磁链幅值。
基于(12)式和相关的自适应观测器设计理论, 五相永磁同步电机无位置传感器驱动控制系统的自适应反电势观测器设计如下

|
(13) |
式中, 


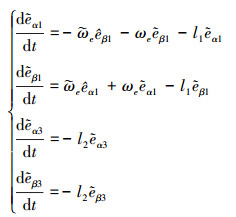
用(13)式减去(12)式, 可以得到五相永磁同步电机的反电势估计误差方程
|
(14) |
式中, 

为了证明所设计的反电势自适应观测器的稳定性, 定义反电势自适应观测器的李雅普诺夫函数如(15)式所示
|
(15) |
式中, E(X)=

|
(16) |
由于ωe为常数且



|
(17) |
将(14)式代入(17)式可得
|
(18) |
由(15)式可以看出, 李雅普诺夫函数V2正定。因此要证明所设计的反电势自适应观测器稳定, 只需证明李雅普诺夫函数的导数


|
(19) |
从(19)式中, 可以得到反电势观测器的自适应律如如(20)式所示
|
(20) |
又因为
|
(21) |
所以, 五相永磁同步电机的转子位置和转子电角速度估计值如(22)式所示
|
(22) |
为了验证所提出的滑模自适应观测器的效果, 利用Matlab/Simulink仿真软件, 搭建了如图 1所示的五相永磁同步电机无位置传感器驱动控制系统。通过仿真实验, 对比验证了常规滑模观测器与所提出的滑模自适应观测器, 在额定转速和突加负载转矩的条件下, 对电机转速、转子位置以及基波反电势和三次谐波反电势的估计效果, 并对仿真实验结果进行了详细分析。仿真实验中的五相永磁同步电机参数和滑模自适应观测器参数如表 1和表 2所示。
| 参数 | 符号 | 数值 |
| 定子绕组阻值 | Rs/Ω | 0.12 |
| 定子电感基波分量 | Lα1, Lβ1/mH | 1.35 |
| 定子电感三次谐波分量 | Lα3, Lβ3/mH | 0.034 |
| 磁链幅值 | Ψm1/Wb | 0.05 |
| 转动惯量 | J/(kg·m2) | 0.002 |
| 摩擦系数 | B/(N·ms-1) | 0.02 |
| 电机极对数 | p | 4 |
| 额定负载转矩 | TL/Nm | 11 |
| 额定功率 | P/kW | 4.4 |
| 额定转速 | ω/(r·min-1) | 900 |
| 参数 | 符号 | 数值 |
| 滑模观测器基波增益 | k1 | 100 |
| 滑模观测器三次谐波增益 | k2 | 40 |
| 反电势自适应观测器基波增益 | l1 | 500 |
| 反电势自适应观测器三次谐波增益 | l2 | 200 |
| Sigmoid函数斜率 | a | 1 |
| 反电势自适应观测器李雅普诺夫函数可调系数 | γ | 1 |
图 3~图 6为常规滑模观测器在额定转速和突加负载转矩条件下的转速、转子位置、反电势基波以及反电势三次谐波波形; 图 7~图 10为所提出的自适应滑模观测器在额定转速和突加负载转矩条件下的转速、转子位置、反电势基波以及反电势三次谐波波形。2种滑模观测器均测试于相同条件下, 电机给定转速900 r/min, 加减速速率为±1 000 r/s, 并在1.2 s时, 负载转矩阶跃至11 Nm。通过对比图 3和图 7可以看出, 常规滑模观测器在电机转速估计过程中的滑模抖振明显大于所提出的自适应滑模观测器。对比图 4~图 6和图 8~图 10中相对应的波形, 可以看出在电机转子位置信号、基波反电势和三次谐波反电势的估计过程中, 常规滑模观测器的抖振现象相对于自适应滑模观测器仍然较为明显。通过计算和分析, 所提出的自适应滑模观测器在电机转速估计过程中的最大瞬态估计误差为0.1%且在稳态时收敛至零, 而常规滑模观测器的转速估计最大误差为0.5%。此外, 自适应滑模观测器在电机转子位置估计过程中的最大瞬态估计误差为0.05%, 主要产生在每个2π弧度之间的位置信号的连续变换瞬间, 而常规滑模观测器的转子位置估计最大误差为0.1%。与常规滑模观测器相比, 所提出的自适应滑模观测器在五相永磁同步电机无位置传感器驱动控制系统中具有更好的转速和位置跟踪效果, 以及较强的抗负载扰动能力。

|
| 图 3 常规滑模观测器实际转速和估计转速波形 |

|
| 图 4 常规滑模观测器实际转子位置和估计转子位置波形 |

|
| 图 5 常规滑模观测器反电势基波分量估计波形 |

|
| 图 6 常规滑模观测器反电势三次谐波分量估计波形 |

|
| 图 7 自适应滑模观测器实际 |

|
| 图 8 自适应滑模观测器实际转子位置和估计转子位置波形转速和估计转速波形 |

|
| 图 9 自适应滑模观测器反电势基波分量估计波形 |

|
| 图 10 自适应滑模观测器反电势三次谐波分量估计波形 |
本文提出了一种基于自适应滑模观测器的五相永磁同步电机无位置传感器控制方法。该方法在考虑三次谐波对五相永磁同步电机影响的条件下, 首先利用五相永磁同步电机模型设计了滑模观测器, 并用sigmoid函数代替了一般滑模观测器常用的符号函数作为电流观测器的开关函数, 以减小滑模抖动并获得更为准确的反电势当量信号。其次设计了反电势自适应观测器来估计电机转速和位置信号, 消除了常规无位置传感器控制系统中滑模观测器所必需的低通滤波器和相位补偿单元, 提高了转速和位置信号的估计精度。此外, 利用李雅普诺夫准则, 证明了所设计的滑模观测器和反电势自适应观测器的稳定性。仿真结果显示, 与常规滑模观测器相比, 所提出的自适应滑模观测器在五相永磁同步电机无位置传感器控制系统中抖动更小, 转速和位置估计误差更小, 反电势估计更为准确, 且能运行在多种复杂条件下, 具有较强的鲁棒性, 适合应用于五相永磁同步电机无位置传感器驱动控制系统。
| [1] | Nguyen N, Meinguet F, Semail E, et al. Fault-Tolerant Operation of an Open-End Winding Five-Phase PMSM Drive with Short-Circuit Inverter Fault[J]. IEEE Trans on Industrial Electronics, 2016, 63(1): 595–605. DOI:10.1109/TIE.2014.2386299 |
| [2] | Mohammadpour A, Parsa L. Global Fault-Tolerant Control Technique for Multiphase Permanent-Magnet Machines[J]. IEEE Trans on Industry Applications, 2015, 51(1): 178–186. DOI:10.1109/TIA.2014.2326084 |
| [3] | Mohammadpour A, Parsa L. A Unified Fault-Tolerant Current Control Approach for Five-Phase PM Motors With Trapezoidal Back EMF Under Different Stator Winding Connections[J]. IEEE Trans on Power Electronics, 2013, 28(7): 3517–3527. DOI:10.1109/TPEL.2012.2223717 |
| [4] | Trabelsi M, Nguyen N K, Semail E. Real-Time Switches Fault Diagnosis Based on Typical Operating Characteristics of Five-Phase Permanent-Magnetic Synchronous Machines[J]. IEEE Trans on Industrial Electronics, 2016, 63(8): 4683–4694. |
| [5] | Pacas M. Sensorless Drives in Industrial Applications[J]. IEEE Industrial Electronics Magazine, 2011, 5(2): 16–23. DOI:10.1109/MIE.2011.941125 |
| [6] | Buccella C, Cecati C, Latafat H. Digital Control of Power Converters-A Survey[J]. IEEE Trans on Industrial Informatics, 2012, 8(3): 437–447. DOI:10.1109/TII.2012.2192280 |
| [7] | Ramezani M, Ojo O. The Modeling and Position-Sensorless Estimation Technique for A Nine-Phase Interior Permanent-Magnet Machine Using High-Frequency Injections[J]. IEEE Trans on Industry Applications, 2016, 52(2): 1555–1565. |
| [8] | Wang G, Zhan H, Zhang G, et al. Adaptive Compensation Method of Position Estimation Harmonic Error for EMF-Based Observer in Sensorless IPMSM Drives[J]. IEEE Trans on Power Electronics, 2014, 29(6): 3055–3064. DOI:10.1109/TPEL.2013.2276613 |
| [9] | Guo L, Parsa L. Model Reference Adaptive Control of Five-Phase IPM Motors Based on Neural Network[J]. IEEE Trans on Industrial Electronics, 2012, 59(3): 1500–1508. DOI:10.1109/TIE.2011.2163371 |
| [10] | Quang N K, Hieu N T, Ha Q P. FPGA-Based Sensorless PMSM Speed Control Using Reduced-Order Extended Kalman Filters[J]. IEEE Trans on Industrial Electronics, 2014, 61(12): 6574–6582. DOI:10.1109/TIE.2014.2320215 |
| [11] | Wang G, Li T, Zhang G, et al. Position Estimation Error Reduction Using Recursive-Least-Square Adaptive Filter for Model-Based Sensorless Interior Permanent-Magnet Synchronous Motor Drives[J]. IEEE Trans on Industrial Electronics, 2014, 61(9): 5115–5125. DOI:10.1109/TIE.2013.2264791 |
| [12] | Gao, Y, Liu W G, Yang Q. Study of Position Sensorless Control Based on Sliding Mode Observer[C]//International Conference on Electrical Machines and Systems, 2011:1-3 |
| [13] | Lee H, Lee J. Design of Iterative Sliding Mode Observer for Sensorless PMSM Control[J]. IEEE Trans on Control Systems Technology, 2013, 21(4): 1394–1399. DOI:10.1109/TCST.2012.2199493 |
| [14] | Qiao Z, Shi T, Wang Y, et al. New Sliding-Mode Observer for Position Sensorless Control of Permanent-Magnet Synchronous Motor[J]. IEEE Trans on Industrial Electronics, 2013, 60(2): 710–719. DOI:10.1109/TIE.2012.2206359 |
