

2. 航宇救生装备有限公司, 湖北 襄阳 441003
第4代弹射座椅的首要任务是解决低空不利姿态下的弹射救生问题[1-3],其核心在于推力矢量的连续控制技术的应用,即通过推力矢量的快速切换,实现对座椅姿态的快速控制,使弹射座椅能够迅速获得尽可能大的升力,从而使座椅轨迹能够尽可能远离地面,即增加弹射救生高度,提升飞行员的安全性[4-5]。美国自20世纪70年代就着手第4代弹射座椅的研制,但由于推力矢量连续控制技术瓶颈,目前仍未实现工程化[6-8]。为了解决这一问题,为第4代座椅控制技术的推进提供理论基础,在20世纪90年代末,美国以ACES Ⅱ座椅为原型,提出了以“H”形火箭包为动力基础的第四代弹射座椅概念[9]。“H”形火箭包能够使座椅具备姿态的快速自适应控制能力,有效弥补第3代座椅在推力矢量连续控制技术方面的缺陷,满足第4代座椅姿态自适应控制技术的需要。然而,由于“H”形火箭包动力执行机构的工作模式限制,导致工程应用面临一些复杂因素,其中最主要的难点在于,为了保证内部压力的平衡,“H”形火箭包所配置的4个喷口采用了两两对偶的工作方式,利用2对喷口间的推力差来产生弹射座椅姿态控制所需的控制力和控制力矩。虽然该模式能够满足推力矢量连续控制的需求,但也将使控制系统的3个通道无法同时可控,进而导致单通道姿态控制时存在其它两个方向的耦合控制力矩,无法满足控制系统设计需求。本文将针对“H”形火箭包特殊的工作方式,通过对4个喷口安装角度进行优化计算,实现控制系统三通道的力矩解耦,从而为以“H”形火箭包为动力基础的第4代弹射座椅姿态控制系统的设计提供可行性。
1 “H”形火箭包动力模型根据相关文献及航宇救生装备有限公司所提供的技术资料[10],“H”形火箭包的结构如图 1所示。

|
| 图 1 “H”形火箭包结构 |
其中αh1、βh1、αh2、βh2为4个喷口的安装角度, 下标1表示喷口1和喷口2的安装角度, 下标2表示喷口3和喷口4的安装角度。xc、yc为人椅系统的重心位置, Lh1、Lh2为人椅系统的尺寸。
“H”形火箭包的三通道控制模式(如图 2所示):

|
| 图 2 “H”形火箭包3种工作模式 |
1)俯仰控制模式

|
2)偏航控制模式

|
3)滚转控制模式

|
其中Fh为“H”形火箭包的总推力, K∈[0, 1]为针栓位置所决定的喷口推力分配比例, Fh1、Fh2、Fh3、Fh4分别为“H”形火箭包4个喷口的推力。可以看出, “H”形火箭包是通过各喷口推力之间两两对称产生推力差, 从而提供座椅姿态及轨迹控制所需的控制力及控制力矩。
根据“H”形火箭包的结构和工作模式, 4个喷口所提供了控制力矩为:
喷口1
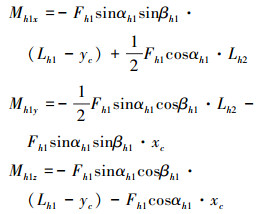
|
(1) |
喷口2
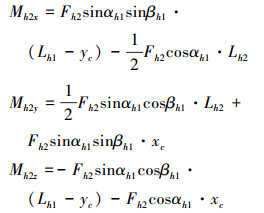
|
(2) |
喷口3
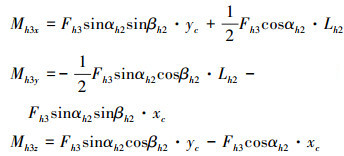
|
(3) |
喷口4
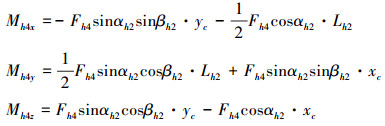
|
(4) |
由此, 当4个喷口同时工作时, 产生的总控制力矩为
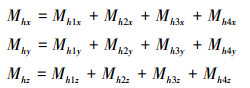
|
(5) |
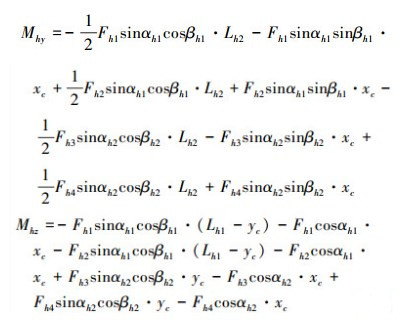
当4个喷口安装角度设计未进行优化设计时, 将会在每个工作模式下都在其他2个控制通道产生耦合控制力矩, 以滚转控制模式为例, 此时火箭包4个喷口在偏航和俯仰通道上产生的耦合力矩为
|
(6) |
同理, 在偏航控制模式下也会存在其他2个通道的耦合控制力矩。但需要注意的是, 由于“H”形火箭包的结构对称性, 在俯仰控制模式下不会存在其他2个通道的耦合控制力矩。
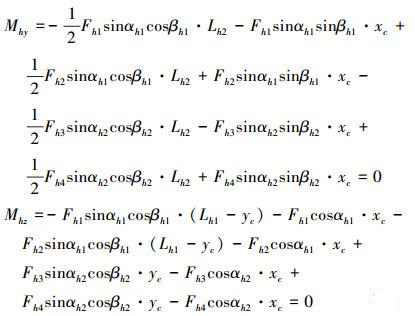
2 控制通道解耦算法设计由于控制系统的三通道非同时可控, 因此控制力矩的解耦原则为:
1)进行俯仰通道控制时:要求偏航控制力矩与滚转控制力矩同时为零;
2)进行偏航通道控制时:要求俯仰控制力矩与滚转控制力矩同时为零;
3)进行滚转通道控制时:要求俯仰控制力矩与偏航控制力矩同时为零。
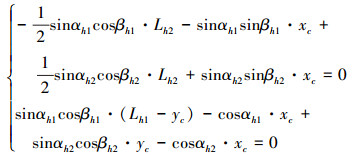
以滚转通道为例, 根据(6)式的耦合力矩描述, 可将解耦需求转化为
|
(7) |
又由于此时有Fh1=Fh4=

|
(8) |
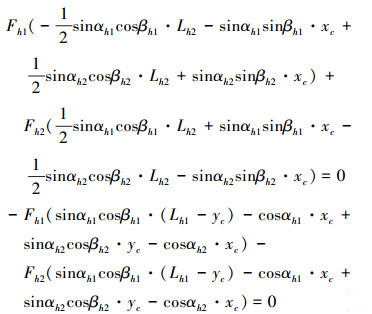
由于控制力矩的解耦应与推力大小无关, 因此(8)式所描述的解耦方程可进一步转化为
|
(9) |
同理, 可获得偏航通道的解耦需求
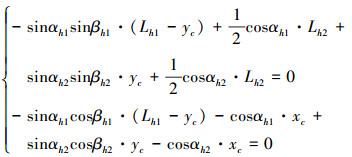
|
(10) |
联立(9)式和(10)式可得控制力矩解耦矛盾方程组
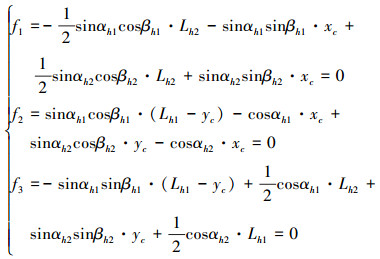
|
(11) |
为了克服气动干扰, 保证姿态控制系统的可控性, 需设置最大控制力矩约束条件
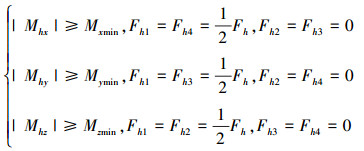
|
(12) |
Mmin表示为满足系统可控性和快速性要求下, 各控制通道所需的最小力矩。
另外, 由于弹射座椅姿态控制的目标是提升弹射高度, 因此在解耦方程中应加上最大升力约束条件
|
(13) |
L表示座椅理想姿态下获得的升力, Lmin表示为满足GJB1800A救生性能要求, 在座椅理想姿态下, “H”形火箭包所需提供的最小升力, Lmin可由GJB1800A中所给出了救生性能包线计算得出。
以(12)式和(13)式作为约束函数, 对(11)式所描述的矛盾方程组求出近似解(αh1*, βh1*, αh2*, βh2*), 应满足
|
(14) |
通过对阈值ε的设定, 可以对“H”形火箭包4个喷口的安装角度进行筛选优化, 从而完成控制系统三通道的力矩解耦。
3 仿真结果及分析为了验证约束函数的合理性及解耦算法的有效性, 本文将侧重不同优化目标设计4组仿真实验:
1)升力优先
解耦约束函数为:|Mhx|≥1 500 Nm, |Mhy|≥1 500 Nm, |Mhz|≥1 500 Nm, L=13 000 N
2)滚转控制力矩优先
解耦约束函数为:|Mhx|≥3 000 Nm, |Mhy|≥1 500 Nm, |Mhz|≥1 500 Nm, L=12 000 N
3)偏航控制力矩优先
解耦约束函数为:|Mhx|≥1 500 Nm, |Mhy|≥3 000 Nm, |Mhz|≥1 500 Nm, L=12 000 N
4)俯仰控制力矩优先
解耦约束函数为:|Mhx|≥1 500 Nm, |Mhy|≥1 500 Nm, |Mhz|≥3 000 Nm, L=12 000 N
| 控制力矩 | 滚转通道 力矩/(Nm) |
偏航通道 力矩/(Nm) |
俯仰通道 力矩/(Nm) |
| 主力矩 | Mhx=1 503 | Mhy=2 662 | Mhz=3 742 |
| 耦合力矩 | Mhy=272 | Mhx=198 | Mhx=0 |
| 耦合力矩 | Mhz=481 | Mhz=481 | Mhy=0 |
| 控制力矩 | 滚转通道 力矩/(Nm) |
偏航通道 力矩/(Nm) |
俯仰通道 力矩/(Nm) |
| 主力矩 | Mhx=3 016 | Mhy=2 950 | Mhz=2 949 |
| 耦合力矩 | Mhy=140 | Mhx=89 | Mhx=0 |
| 耦合力矩 | Mhz=16 | Mhz=16 | Mhy=0 |
| 控制力矩 | 滚转通道 力矩/(Nm) |
偏航通道 力矩/(Nm) |
俯仰通道 力矩/(Nm) |
| 主力矩 | Mhx=1 735 | Mhy=3 004 | Mhz=4 791 |
| 耦合力矩 | Mhy=174 | Mhx=81 | Mhx=0 |
| 耦合力矩 | Mhz=48 | Mhz=48 | Mhy=0 |
| 控制力矩 | 滚转通道 力矩/(Nm) |
偏航通道 力矩/(Nm) |
俯仰通道 力矩/(Nm) |
| 主力矩 | Mhx=1 514 | Mhy=3 002 | Mhz=5 078 |
| 耦合力矩 | Mhy=131 | Mhx=86 | Mhx=0 |
| 耦合力矩 | Mhz=50 | Mhz=50 | Mhy=0 |
1)升力优先
2)滚转控制力矩优先
3)偏航控制力矩优先
4)俯仰控制力矩优先
从表 1、表 3、表 5和表 7可以看出, 经过喷口安装角度优化配置, 座椅理想姿态下可获得的升力满足了最大升力约束条件的要求, 而从表 2、表 4、表 6和表 8可以看出, 各控制通道的主力矩也都满足了最大控制力矩约束条件的要求。
另外从表 2、表 4、表 6和表 8还可以看出, 经过喷口安装角度优化配置, 滚转和偏航通道工作时所产生的耦合控制力矩远小于控制通道的主力矩, 而俯仰通道则由于“H”形火箭包总体结构的对称性, 控制通道间并不存在耦合力矩。
需要注意的是, 在仿真实验1)中, 为了保证最大升力约束条件的苛刻要求, 仿真时适当放大了矛盾方程组中阈值ε, 滚转和偏航通道中的耦合力矩因而稍微偏大, 但仍然比主力矩小一个数量级, 因此并不影响解耦效果。
而在仿真实验2)、3)、4)中, 由于最大控制力矩约束条件不如最大升力约束条件苛刻, 矛盾方程组中阈值ε设定在一个较小的值上, 滚转和偏航通道中的耦合力矩因而较小, 被限制在主力矩的10%以内, 解耦效果更优。
综上所述, 本文通过对约束条件下矛盾方程组的求解完成“H”形火箭包4个喷口安装角度的优化, 良好的仿真结果表明, 本文设计的控制通道解耦算法能够很好的实现控制系统三通道的力矩解耦, 为弹射座椅姿态控制系统的设计提供了可行性。
4结论
本文基于“H”形火箭包的特殊结构, 建立了其动力模型。在此基础上, 根据“H”形火箭包工作模式的特点, 基于约束条件下矛盾方程组的求解过程, 设计了三通道非同时可控弹射座椅控制通道解耦算法, 以实现控制系统三通道的力矩解耦, 为弹射座椅自适应控制系统的深化设计提供了理论上的可行性。
通过仿真分析, 研究了不同约束条件对控制通道解耦效果的影响, 并以矛盾方程组的求解阈值为调节手段, 对约束条件和耦合力矩间的关系进行了深入分析。仿真结果表明, 即便在较为苛刻的约束条件下, 本文所设计的控制通道解耦算法仍然能够将各控制通道耦合力矩限制到主力矩的10%以下, 因此证明了本文算法具有较高的可信性和实用性。
| [1] | Wang Y F, Han L L, Wang F. Review of Ejection Seat Electronic Program Controller[J]. Applied Mechanics and Materials, 2014(551): 530–534. |
| [2] | Miles J E. Factors Associated with Delayed Ejection in Mishaps Between 1993 and 2013[J]. Aerospace Medicine and Human Performance, 2015, 86(8): 774–781. |
| [3] | Wang Y F, Chen G, Han L L. The Comprehensive Survey for the Numerical Simulation of the 4th Generation Rocket Ejection Seat Thrust Vector Control System[J]. Design, Manufacturing and Mechatronics, 2014(551): 523–529. |
| [4] |
郁嘉, 林贵平, 毛晓东.
弹射救生数值仿真及不利姿态下救生性能分析[J]. 航空学报, 2010, 31 (10): 1927–1932.
Yu Jia, Lin Guiping, Mao Xiaodong. Numerical Simulation of Ejection Seat and Analysis of Performance under Adverse Attitudes[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(10): 1927–1932. (in Chinese) |
| [5] |
蒋伟.基于Matlab弹射救生系统全过程仿真研究[D].南京:南京航空航天大学, 2012
Jiang Wei. The Whole Trajectory Simulation Research of Ejection Seat and Occupant System with Matlab[D]. Nanjing, Nanjing University of Aeronautics and Astronautics, 2012(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10287-1012041231.htm |
| [6] | Guan H, Zhu Y, Zhao X, et al. Aerodynamic Characteristics of Ejection Seat and Occupant[C]//51st AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, 2013 |
| [7] | Mao X D, Lin G P, Yu J. Predicting Ejection Velocity of Ejection Seat via Back Propagation Neural Network[J]. Journal of Aircraft, 2011, 48(2): 668–672. DOI:10.2514/1.C031196 |
| [8] | Zhu Y, Guan H, Zhao X, et al. Computational Studies of Jettisoned Canopy and Ejection Occupant/Seat[C]//50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, 2012 http://arc.aiaa.org/doi/pdf/10.2514/6.2012-890 |
| [9] | Blairnald A. 4th Generation Escape System Technologies Demonstration Phase Ⅱ[R]. Generation Escape System Technologies Demonstration Phase Ⅱ, 1998 |
| [10] |
吴铭.自适应座椅仿真数学模型研究报告[R].襄阳:航宇救生装备有限公司, 2013
Wu Ming. Research Report of the Simulation Model of the Adaptive Seats[R]. Xiangyang, Aerospace Life-Support Industries, LTD, 2013(in Chinese) |
2. Aerospace Life-Support Industries, LTD, Xiangyang 441003, China
