

2. 长安大学 电子与控制工程学院, 陕西 西安 710064 ;
3. 西安建筑科技大学 信息与控制工程学院, 陕西 西安 710055
近年来,利用稀疏线索和局部信息来搜索追踪目标日益受到机器人领域研究者的关注[1-2]。利用机器人携带传感器自主探测和发现目标(源)释放的线索——化学物质、光、热等, 进而追踪此类线索至其源头位置,是一种搜寻目标(源)的有效手段,其在事故救援、泄露检查[3]、污染源搜寻[4]等方面有着十分广阔的应用前景。
通常在流体环境中,目标释放的线索被撕裂成烟丝或碎片状,导致其检测间断和稀疏,无法获得较为稳定的浓度梯度,对搜索者追踪源头带来了严峻的挑战。然而在自然界中,许多动物利用稀疏的气味线索能够在复杂的环境中寻找食物、配偶、巢穴。例如,雄蛾利用触角在几百米外就可以嗅到雌蛾释放的信息素,从而确定雌蛾位置[5]。鲨鱼可以嗅出浓度只有百万分之一的血腥味,对数公里外的猎物进行追捕[6]。动物在稀薄气味线索环境下的嗅觉溯源能力为机器人搜索释放源提供了参考和启发。
随着信息论成功解释了很多生物现象,研究者认为“信息”是许多生物嗅觉溯源行为的底层驱动机制[7]。Vergassola等[8]从信息论角度研究嗅觉行为机理,首次提出了以信息趋向性(infotaxis)获取最大信息增益的源搜索策略(亦称为信息熵决策),成功地揭示了嗅觉溯源现象。Zhang[9]和Voges[10]对信息趋向性方法和常规的嗅觉行为模仿方法进行了定量比较分析,发现信息趋向性方法在湍流和噪声环境中的搜索效率优于嗅觉行为模仿方法。Rodriguez等[11]进一步指出,信息趋向性方法对噪声和湍流环境具有良好的鲁棒性。最近,Martinez和Moraud等[12-13]发现信息趋向性的搜索路径类似于雄蛾追踪雌蛾的路径轨迹,这在一定程度上印证了信息趋向性方法符合生物嗅觉溯源行为的机理。
虽然信息趋向性方法非常适用于线索稀疏情形下源搜索,在搜索效率上表现出比现有基于行为的方法以及基于模型的方法更为优越的性能[10, 12],并且在路径形态上更接近于自然界中生物的溯源嗅觉行为路径。但是,该方法存在固有缺陷,即在局部线索稠密或近源区域的搜索性能却不尽理想[11]。实验表明,在局部线索稠密或近源区域的趋近效率低下,搜索路径存在大量的折转,并可能发生局部自陷问题。Voges等[10]指出信息趋向性搜索策略在近源区域趋近率低下的原因在于熵降方向发生频繁转变增加了许多横向运动而非逆风运动,致使趋近效率降低。为了克服这一缺陷,Masson等[14]加入了最大似然行为这一生物重要的认知方式,以自由能做为决策手段,避免了自陷行为。但是,该方法基于近似贝叶斯后验概率,且依赖于牺牲搜索效率的参数选择。Ristic等[15]将巴氏距离结合到信息趋向策略中,有效提高了趋近效率,但巴氏距离的引入急剧增加了计算量。
本文在分析源趋近过程中源位置估计概率迁移对期望信息梯度影响的基础上,分析了经典信息趋向性方法(infotaxis)存在的不足,指出了一种基于局部概率可靠度的信息趋向源搜索方法(R-infotaxis)。通过引入局部概率可靠度,充分发挥信息熵在线索稠密和近源区域的引导作用,得到更为准确的信息熵下降方向,使经典信息趋向方法中搜索与利用的平衡更倾向于搜索。通过在平均路径长度、趋近效率、信息收集速率等方面与经典信息趋向性方法的对比分析, 验证了所提方法的可行性和有效性。
1 问题描述利用机器人进行源搜索任务,需构建包含浓度、风速、位置等信息的源线索空间分布的扩散模型和传感器检测模型。源搜索的基本思路是根据机器人的实时运动和检测到的信息,结合上述模型采用贝叶斯推理得出源位置的概率分布。本节对其中涉及的基本模型加以介绍。
1.1 扩散模型在真实环境中,扩散的化学物质分子被湍流所扰乱,结构不规则。在此,采用湍流环境下常用的统计气体扩散模型刻画线索不连续和随机的分布特性。该模型将捕获线索视为粒子遇碰,以遇碰概率描述线索的空间分布。若设搜索者在位置r处对源r0=(x0, y0)释放的线索进行捕获, 则在二维空间中, 位置r处的线索捕获率(采样率)R(r|r0)为[8]
|
(1) |
式中, Q为线索释放率, D为综合了湍流扩散和分子扩散的线索扩散率, K0为零阶第Ⅱ类贝塞尔函数, α为搜索半径。V为流体的平均速度, 由于扩散率D的影响, 其在方向和大小上均有瞬时波动。λ为特征长度, 
对于在流体中扩散的化学物质, 传感器所检测到的浓度在时间和空间上存在剧烈波动, 其瞬间浓度梯度易出现突变。为了避免具体浓度数值的不准确性, 本文采用二值检测传感器[16]对采样浓度进行处理, 即当传感器的检测浓度数值大于某一阈值便认为捕获线索, 感知结果为“1”。受此作用, 在位置r的线索捕获近似为一个泊松过程。因此, 在有限时间间隔Δt内, 传感器在位置r处捕获z次线索服从泊松分布, 其概率为
|
(2) |
式中, λp=R(r|r0)·Δt, 其与线索捕获率成正比。
1.3 贝叶斯推理由于线索捕获率与离源距离有关, 在机器人轨迹Γt上发生的检测序列[rt1, rt2, …, rtn]就携带了源位置信息。可利用贝叶斯推理从轨迹Γt中得到源位置r0概率分布Pt(r0)。定义轨迹Γt的可能性为

|
(3) |
式中, N是机器人沿轨迹Γt捕获线索的总次数, tn对应于捕获时刻, 
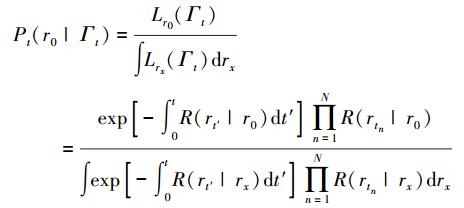
基于此, 机器人经历轨迹Γt后源位置的贝叶斯后验概率Pt(r0|Γt)为[8]
|
(4) |
若不存储全部路径信息, 则贝叶斯后验概率Pt(r0|Γt)迁移为

|
(5) |
式中, η为机器人在时间间隔Δt内捕获线索的次数, Zt+Δt为归一化常数。
2 信息趋向性方法传统源搜索策略包括基于浓度的化学趋向性方法、基于风向的风趋向性方法等。然而在湍流环境下, 由于局部浓度突变及风向不稳定, 使得化学趋向性和风趋向性方法搜索效率低下甚至不可行。信息趋向性方法将浓度、风向、风速等融合为“信息”这一单一要素作为搜索者实施搜索的线索, 能有效克服湍流环境下的源搜索问题[13]。
在信息趋向性方法中, 信息熵被作为衡量源位置不确定性的测度。信息熵的变化被作为一种瞬时势场, 驱使机器人向熵降最快的方向移动, 当熵值减为0时, 即不确定性消失, 则认为找到源。
基于贝叶斯推理的源位置后验概率分布Pt(r0|Γt)的熵为
|
(6) |
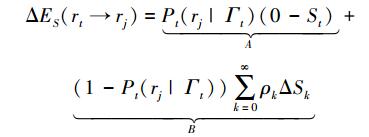
式中, A项表示源以Pt(rj|Γt)的概率位于rj处, 对应的熵减小值为0-St, 为“利用(exploitative)”项; B项表示rj处未发现源, 但期望捕获k个线索, 与此对应的熵减小值为
基于(6)式得出的熵减量, 选取搜索者当前所有可行方向中下降幅度最大者作为搜索者最佳移动方向, 如此往复, 直到源被确认。因而信息趋向性方法的本质是将源位置的搜索过程转换为信息源的趋近过程。这一策略尤其适用于稀疏线索环境, 然而, 该方法由于局部频繁捕获引起探索与利用失调导致在线索稠密或近源区域产生趋近效率下降和自陷等问题。下文将对此予以讨论并给出改进方案。
3 基于局部概率可靠度的信息趋向搜索方法记搜索者的当前位置为rt, 候选的行进方向为rj={·, →, ↑, ←, ↓}, 分别对应于原处、左、右、前、后5个方向。在理想情况下, (6)式中的A项仅在源位置后验估计概率较大且准确可靠时发挥作用。实际源搜索过程则不然, 局部源存在概率Pt(rj)的扰动影响A项在信息熵降的比重。
首先考察搜索者当前位置rt处捕获线索与否对源存在概率Pt(rj)影响, 根据(5)式可得

|
(7) |
该式表明Pt(rj)受rt处是否捕获线索的影响。具体而言, (1)若在rt处未能捕获线索, Pt(rj)在Pt-Δt(rj)的基础上减小, 即源在rj处的可能性减小。(2)若在r处捕获到线索, Pt(rj)在Pt-Δt(rj)的基础上增大, 即源在rj处的可能性增大。
在(6)式中, 候选方向rj处源位置后验概率分布Pt(rj)起到调节探索(即B项)与利用(即A项)在信息梯度中相对权重的作用。然而, 由(7)式可知, 搜索过程中Pt(rj)会存在以下3种扰动情况:
1)捕获线索与否是个随机过程, 其对于候选运动方向的后验概率影响很大, 尤其是捕获线索后, Pt(rj)突然增大。
2)若机器人在邻近位置相继捕获线索, 由此产生的叠加效应使得Pt(rj)扰动加剧。这一情况在线索稠密和近源区域表现尤为突出。
3)在捕获线索较少时, 路径Γt未包含足够的源位置信息, 导致(5)式估计出的Pt(rj)不可靠。
由于上述后验概率Pt(rj)的扰动存在, 使利用项A在信息熵降中比重失调。尤其是当邻近位置相继捕获线索时, Pt(rj)出现突变增大, 导致A项在ΔES(rt→rj)中的权重增加, 致使全局的信息熵被局部不可靠概率干扰, 机器人在局部选择非最佳的前进方向。因而, 经典信息趋向性方法容易产生自陷和趋近效率低下问题。
3.1 局部概率可靠度鉴于信息趋向方法中的“利用”是以最大似然作为实现方式。Pt(rj)表现了最大似然的作用强度, 其在线索稠密条件下的突然增大会导致局部最大似然的“过度”作用。事实上, 贝叶斯推理后验概率分布梯度稳定性决定了最大似然的可靠程度:迁移变化剧越烈(即梯度越不稳定), 采用最大似然趋向源位置的可靠度越低; 反之, 越平缓, 梯度越稳定, 可靠度越高。通过前面分析已知, 当线索稠密或近源区域频繁捕获线索, Pt(rj)迁移变化剧烈; 当脱离这个区域, Pt(rj)迁移变化平缓。据此规律, 考虑引入局部概率可靠度加以克服。
记当前时刻至搜索者前次捕获线索的时间间隔为tlast, 局部概率可靠度β是关于tlast的函数。当搜索者在位置rt处捕获到线索时, 候选方向rj的源分布概率Pt(rj)突然迁变, 此时可靠度β=0, 随着时间tlast的增加, 局部概率不发生突然迁变, 可靠度β随之恢复到1。据此, 将β设计成如下形式

|
(8) |
式中, a>0为调节参数。该式实现可靠度在线索捕获时引起局部概率扰动情况下动态切换过程。
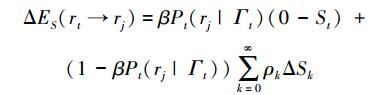
3.2 改进的信息趋向性方法基于前文分析及相关定义, 本文提出一种基于局部概率可靠度的信息趋向方法。该方法的下一步移动到周围栅格(或者静止不动)导致的熵的减小量为
|
(9) |
式中, ρk表示在时间间隔Δt内在位置rt处能够捕获k个线索的概率, 满足泊松分布ρk(rj)=hke-h/k!, h为捕获线索次数的期望, 根据(2)式检测模型, 
相较于(6)式、(9)式得到的信息熵减能够消除局部概率Pt(rj)扰动的影响, 充分发挥信息熵这一全局量的引导作用, 得到更为准确的信息梯度方向。当机器人频繁捕获线索时, β的引入减弱局部概率扰动对信息梯度影响; 当脱离局部多次捕获区域(即线索稠密和近源区域), 局部概率恢复对信息梯度影响。这样可以避免由局部概率扰动引起的趋近效率降低和局部自陷问题。
Infotaxis方法包含“熵减期望”和“最大似然”两种引导策略。其中熵减期望为探索的实现方式, 最大似然是利用的实现方式。探索与利用的平衡是以熵减期望和最大似然的权衡为准则。熵减期望引导搜索向着期望获得更多线索的方向(概率集中的区域), 而最大似然趋向估计的源分布概率最大的位置。与经典信息趋向性方法相比, (9)式的最大不同在于通过局部概率可靠度减弱频繁捕获线索时最大似然的作用。可靠度β在信息趋向方法中用以调整最大似然和信息熵梯度的平衡关系, 在Pt(rj)突然增加时不至于使最大似然作用过度。
另外值得注意的是, 本文所提方法与经典信息趋向性方法在源确认方面认知不同。在经典信息趋向性方法中, 机器人沿熵降的方向行进, 信息熵为0时源被确认, 这是信息论视角角下的源确认问题。然而我们研究发现到达源位置时的信息熵并不为零。因此, 对于机器人而言, 到达即为确认(源确认方法见文献[17])而非信息论角度下的确认, 这是经典信息趋向方法认识上的偏差, 其由(6)式中A项作用过强导致。在本文所提方法中, 利用局部概率可靠度使捕获线索频繁时倾向于B项, 即强化探索的作用, 更有利于趋近源位置。
3.3 算法流程基于局部概率可靠度的信息趋向性方法的具体步骤如下:
Step1 初始化后验概率Pt(r0)和信息熵St;
Step2 计算在每个rj处期望捕获线索次数h(rj), 
Step3 对每个rj计算捕获k次线索的后验概率迁移Pkrj(t+Δt) (r0)=Z-1Pt(r0)e-R(rj(t+Δt)|r0)ΔtRk(rj(t+Δt)|r0), 进而计算相应的信息熵Skrj(t+Δt);
Step4 计算可靠度β; 根据公式(9)计算由位置rt移动到rj可能引起的信息熵变化ΔES(rt→rj), 选择其中ΔES(rt→rj)变化最大的rj作为最佳移动位置;
Step5 记录在t时刻位置rt移动到t+Δt时刻位置rj的时间Δt内, 捕获的线索数量η=0, 1, 2, …;
Step6 根据公式(5)更新后验概率Pt(r0)为Pt+Δt(r0)以及相应的信息熵由St更新为St+Δt;
Step7 返回step2, 直至到达源所在位置结束。
4 仿真分析本节通过数值仿真实验, 分析比较本文所提R-infotaxis方法与经典infotaxis方法利用稀疏线索源搜索性能, 验证所提方法的可行性和有效性。
4.1 仿真环境实验中采用Balkovsky的格构烟羽模型生成烟羽, 实现方法详见文献[18], 并考虑增加了气味粒子的短暂寿命。实验的仿真参数设置如下[9]:粒子扩散率D=1, 粒子生命周期τ=50, 源释放率Q=1, 平均风速V=1, 传感器的测量半径α=0.5。搜索空间为100×100, 源的位置随机指定。可靠度β的计算式(8)中参数a=100。所有数值仿真在MATLAB中进行。
4.2 分析指标为了便于分析和评价机器人的搜索性能, 定义以下一组指标:
1)路径长度:机器人完成搜索任务所经历的轨迹长度, 即从起始位置到达源所在位置的欧式距离, 是衡量搜索方法优劣的基本指标。
2)趋近效率:逆风运动在搜索过程中所有运动中所占的比重。机器人在搜索过程中运动包括横越运动(traverse)、逆风运动(upwind)和顺风运动(downwind)3种运动形式。其中, 逆风运动对源搜索最为有效, 可用于评价搜索运动的有效性(路径质量)。
3)信息收集速率:源搜索过程中信息熵时间演化曲线的斜率。源搜索任务可视为趋向信息源的过程, 源趋近过程中的线索捕获即为信息收集。信息熵的变化可以实时反映这一过程的进度。
4.3 仿真结果为了直观展示R-infotaxis的源搜索性能, 图 1给出了一组不同起始位置下R-infotaxis方法的典型搜索路径。为了便于比较, 图中同时给出了相同条件下经典infotaxis方法的搜索路径。可以看出, 从不同的起始位置出发, 2种方法均能完成源搜索任务, 但两者的搜索路径存在显著差异。(1)路径细节方面, 经典infotaxis方法的搜索路径曲折, 存在较多折转, 且折转多发生于线索刚捕获时; R-infotaxis的路径更为平直, 尤其在近源区域, 其路径径直奔向源位置。(2)经典infotaxis路径中多次出现局部重复搜索的自陷问题(如图 1a)所示)。由此可见, R-infotaxis的搜索表现好于infotaxis。

|
| 图 1 经典infotaxis方法与R-infotaxis方法的搜索路径比较 |
图 2进一步展示了机器人搜索的动态过程, 图中灰色部分显示源位置的后验概率Pt(r0), 其灰度反映了源存在概率的高低。从中可以看出:(1)随着机器人运动不断捕获线索, 源位置估计概率发生迁移, 最终高概率区域涵盖源所在位置; (2)infotaxis方法在相继捕获线索时, 邻近区域概率突增(灰度加深, 如图 2a)~图 2c)所示), 容易诱发局部回转甚至引发自陷问题; 反观R-infotaxis方法即便在连续捕获线索的情况下基本不受局部概率增加的影响, 不发生折转, 倾向于前向运动(如图 2d)~图 2f)所示)。

|
| 图 2 infotaxis(a~c)和R-infotaxis(d~f)搜索的动态过程 |
上述仿真实例定性地验证了R-infotaxis方法对经典infotaxis方法的搜索性能提升。下面利用Monte Carlo仿真实验,基于路径长度、趋近效率、信息收集效率等量化指标对两者做进一步比较实验研究。为减少误差,下述所有结果均取50次独立仿真的平均值,仿真条件如图 1a)所示。
1)路径长度
表 1给出了路径长度统计结果,可以看出,(1)本文提出的R-infotaxis方法平均路径长度相对于经典infotaxis方法缩短了约20%;(2)在最短路径方面,较经典方法可缩短近28%;(3)在最长路径方面,R-infotaxis较经典方法优势不甚显著,这表明R-infotaxis能以更短路径完成源搜索任务。
2)趋近效率
图 3给出了搜索路径中逆风、横越、顺风等运动成分(依据折转方向统计)的占比分布。可以看出:(1) 3种运动中逆风运动占比最高,显示出整体径向趋近于源(见图 1a));横越风运动占比适中,有利于探索范围的扩展;顺风和停留运动占比最少,可减少无效运动。(2)相较经典infotaxis而言,R-infotaxis方法提高了逆风运动的比重,由51.3%提高到62.4%,这是搜索路径质量得以提高的主要因素;横越风运动由39.5%降到34.3%,无效运动也降到极低的3.3%,这些减少可一定程度上减少回转。究其原因,这是由于可靠度的引入,使得前向性得到加强,搜索者倾向于逆流而上,同时保持一定的横越风运动,以保持横向搜索能力。

|
| 图 3 运动成份对比 |
3)信息收集速率
为了量化分析R-infotaxis方法与经典infotaxis方法的信息收集速率的差异,图 4给出了图 1a)所示R-infotaxis和infotaxis搜索过程对应的信息熵时间演化曲线和相应的线索捕获量。

|
| 图 4 信息熵变化曲线 |
从中可以看出,整个搜索过程可以明显分成2个阶段:(1)初始阶段(0~80),两者曲线基本重合,这表明在线索稀疏情况下信息收集速率无较大差异。(2)后期阶段(>80),R-infotaxis的熵曲线下降趋势明显快于infotaxis,这表明R-infotaxis具有更快的信息收集速率,即趋向信息源的进程更快。出现上述情形的原因在于:初始阶段线索稀疏,R-infotaxis方法退化为经典infotaxis方法,故两者的信息熵时间演化曲线基本重合;之后,随着线索捕获逐渐增多,R-infotaxis方法中最大似然作用减弱,机器人继续沿着期望熵降方向行进,而infotaxis方法受局部最大似然作用较强,局部折转增加,导致其信息收集速率低于R-infotaxis方法。总体而言,本文提出的R-infotaxis方法拥有更高的信息收集速率。
综合以上多方面对比,本文提出的R-infotaxis方法较经典infotaxis方法的搜索性能更为优良,其搜索路径更短、趋近效率更高、信息收集速率更快。
5 结论针对经典infotaxis方法在线索稠密和近源区域存在趋近效率低下及自陷的问题,通过分析得出了局部概率扰动是局部最大似然过渡作用,导致趋近效率降低。据此引入了局部概率可靠度,用以调整在线索频繁捕获时最大似然作用强度。进而,提出了一种新的基于概率可靠度的信息趋向方法,从而保证以良好的趋近效率趋近源。最后实验比较了本文提出的基于概率可靠度的信息趋向方法和经典信息趋向方法的搜索性能,分别考察了平均路径长度、信息收集速率、趋近效率。结果表明,基于局部概率可靠度的信息趋向方法在这些方面的表现优于经典信息趋向方法,更适应于局部稠密和稀疏等复杂的环境。
| [1] | Ishida H, Wada Y, Matsukura H. Chemical Sensing in Robotic Applications:A Review[J]. IEEE Sensors Journal , 2012, 12 (11) : 3163–3173. DOI:10.1109/JSEN.2012.2208740 |
| [2] | Lilienthal A J, Loutfi A, Duckett T. Airborne Chemical Sensing With Mobile Robots[J]. Sensors , 2006, 6 (11) : 1616–1678. DOI:10.3390/s6111616 |
| [3] | Ishida H, Nakayama G, Nakamoto T, et al. Controlling a Gas/Odor Plume-Tracking Robot Based On Transient Responses Of Gas Sensors[J]. IEEE Sensors Journal , 2005, 5 (3) : 537–545. DOI:10.1109/JSEN.2004.839597 |
| [4] | Woodfin R L. Trace Chemical Sensing of Explosives[M]. John Wiley & Sons, 2006 |
| [5] | Vickers N J. Mechanisms of Animal Navigation in Odor Plumes[J]. The Biological Bulletin , 2000, 198 (2) : 203–212. DOI:10.2307/1542524 |
| [6] | Gardiner J M, Atema J. The Function of Bilateral Odor Arrival Time Differences in Olfactory Orientation of Sharks[J]. Current Biology , 2010, 20 (13) : 1187–1191. DOI:10.1016/j.cub.2010.04.053 |
| [7] | Linsker R. Perceptual Neural Organization:Some Approaches Based on Network Models and Information Theory[J]. Annual Review of Neuroscience , 1990, 13 (1) : 257–281. DOI:10.1146/annurev.ne.13.030190.001353 |
| [8] | Vergassola M, Villermaux E, Shraiman I. "Infotaxis" As a Strategy for Searching without Gradients[J]. Nature , 2007, 445 (7126) : 406–409. DOI:10.1038/nature05464 |
| [9] |
张思齐, 崔荣鑫, 徐德民.
稀疏环境中信息趋向性搜索算法性能分析[J]. 机器人 , 2013, 35 (4) : 432–438.
Zhang S Q, Cui R X, Xu D M. Performance Analysis on The Infotaxis Algorithm for Searching in Dilute Environments[J]. Robot , 2013, 35 (4) : 432–438. DOI:10.3724/SP.J.1218.2013.00432 |
| [10] | Voges N, Chaffiol A, Lucas P, et al. Reactive Searching and Infotaxis in Odor Source Localization[J]. Plos Computational Biology , 2014, 10 (10) : e1003861–e1003861. DOI:10.1371/journal.pcbi.1003861 |
| [11] | Rodrguez J D, Gmez-Ullate D, Meja-Monasterio C. Limits on the Performance of Infotaxis under Inaccurate modelling of the Environment[J]. Eprint Arxiv , 2014, 1408 (1873) : 1–8. |
| [12] | Martinez D, Martin-Moraud E. Reactive and Cognitive Search Strategies for Olfactory Robots[J]. Neuromorphic Olfaction , 2013 (5) : 153–172. |
| [13] | Moraud E M, Martinez D. Effectiveness and Robustness of Robot Infotaxis for Searching in Dilute Conditions[J]. Frontiers in Neurorobotics , 2010, 4 (4) : 1–8. |
| [14] | Masson J B. Olfactory Searches with Limited Space Perception[J]. Proceedings of the National Academy of Sciences , 2013, 110 (28) : 11261–11266. DOI:10.1073/pnas.1221091110 |
| [15] | Ristic B, Skvortsov A, Gunatilaka A. A Study of Cognitive Strategies for an Autonomous Search[J]. Information Fusion , 2016, 28 (C) : 1–9. |
| [16] | Ristic B, Gunatilaka A, Gailis R. Achievable Accuracy in Gaussian Plume Parameter Estimation Using a Network of Binary Sensors[J]. Information Fusion , 2015, 25 (32) : 42–48. |
| [17] | Hayes A T, Martinoli A, Goodman R M. Distributed Odor Source Localization[J]. IEEE Sensors Journal , 2002, 2 (3) : 260–271. DOI:10.1109/JSEN.2002.800682 |
| [18] | Balkovsky E, Shraiman B I. Olfactory Search at High Reynolds Number[J]. Proceedings of the National Academy of Sciences , 2002, 99 (20) : 12589–12593. DOI:10.1073/pnas.192393499 |
2. School of Electronic and Control Engineering, Chang'an University, Xi'an 710064, China ;
3. School of Information and Control Engineering, Xi'an University of Architecture and Technology, Xi'an 710055, China
