

三轴磁通门磁传感器具有体积小、精度高、抗冲击性能好等特点,在地磁导航、航空磁探、水下平台磁场测量等需要磁场测量场合有着广泛的应用[1]。由于加工工艺等原因,三轴磁传感器各轴很难做到完全正交,同时三轴之间也存在一定差异,接收器电路存在漂移、噪声,接收器铁芯存在剩磁,数据采集存在截断误差,2个三轴磁通门传感器还存在磁场测量系配准误差[2-6],这些误差因素使得磁场测量值与实际值之间有一个较大的误差。经验表明,灵敏度系数差异造成的测量误差约有数十纳特,零点偏差在100 nT左右。在地磁场背景场下,0.1°的角度误差会引起2个磁通门传感器测量差约300 nT,远远大于磁异常引起的磁场之差。因此,磁通门梯度仪在使用前必须进行固有误差的校正。
三轴磁通门传感器校正的关键是校正模型精度和模型系数的求解,对于校正模型通常考虑三轴正交性、灵敏度一致性和零偏误差3个因素,而模型系数求解的方法有很多种,比如Crassidis提出了基于卡尔曼滤波和无迹滤波的实时校正方法[7],Manon提出了极大似然估计校正方法[8],Jun提出用支持向量回归(support vector regression)方法进行误差校正[9],John提出了一种非线性最小二乘法参数估计[10],Wu提出了采用最优二次似然估计校正算法[11],邱立军提出了模型系数自动搜索方法[12],龙礼提出了自适应系数求解法[13],黄玉提出了线性神经网络的求解方法[14-15],归纳起来这些方法对模型参数估计都有一定的效果,但算法求解过程复杂、可操作性不强,不适用于工程实际应用。
本文对三轴磁通门传感器的零偏误差、灵敏度误差和三轴非正交误差所引起的测量误差进行了深入研究,建立了三轴磁通门传感器测量误差自较准模型;同时针对磁梯度仪中两磁通门传感器摆放方位不一致的问题,提出了磁通门传感器的互校正方法。仿真模拟和试验验证表明,采用最小二乘算法能够对磁梯度仪中的测量误差进行有效校正,整个校正过程求解简单、操作方便。
1 磁梯度仪中单个磁通门的自校正模型为了建立单个三轴磁通门传感器的自校正模型,首先建立三轴磁传感器坐标系。磁传感器的3个轴坐标分别为Xo、Yo和Zo, 其输出信号分别为BX0、BY0和BZ0; 正交坐标系X、Y和Z, 外磁场在正交坐标投影分别为BX、BY和BZ。正交坐标系和三轴磁传感器坐标满足以下关系:(1)Z轴与Zo轴重合; (2)坐标面YOZ与YOOZO共面, 并假设OY0轴与OY轴夹角为β, XO轴与X轴夹角为λ, 与Z的夹角为π/2+α, 与Y轴夹角为π/2+γ。如图 1所示。

|
| 图 1 三轴磁传感器坐标系 |
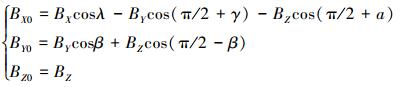
只考虑三轴不正交影响, 三轴磁传感器每个轴的输出外磁场3个分量在传感器该轴上投影的和, 用BX0、BY0和BZ0表示, 三轴的输出表示为
|
(1) |
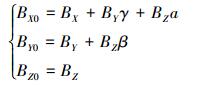
实际三轴磁传感器很难保证三轴完全正交, 但是其误差可以控制在1°以内, 角度参数λ、α、γ和β为小量, 根据泰勒展开, 忽略高阶小量, 做近似处理, cosλ≈1, cosβ≈1, sinγ≈γ, sinα≈α, sinβ≈β, 三轴磁传感器输出简化为
|
(2) |
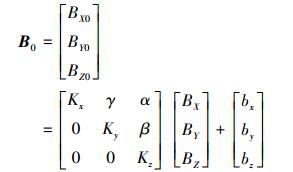
考虑灵敏度不一致, 忽略线性度不一致性, 假设三轴的灵敏度分别为KX、KY和KZ; 考虑三轴磁传感器铁芯剩磁和电路的漂移, 假设剩磁和电路漂移为恒定值, 分别用bx、by和bz表示, 三轴磁传感器输出表示为
|
(3) |
如果记
|
|
则(3)式简化为

|
忽略二阶小量有
|
(4) |
利用向量二范数的定义, 忽略二阶小量有
|
(5) |
由(4)式和(5)式可得

|
(6) |
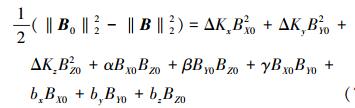
将(6)式右边中各元素展开后可得到
|
(7) |
当单个磁通门传感器测量N个磁场数据, 会得到如(7)式所示的N个方程组, 当方程组个数大于未知系数个数, 采用最小二乘法可以求解方程组中的未知系数, 即磁传感器三轴灵敏度误差Kx、Ky和Kz、非正交性误差α、β和γ以零偏误差bx、by和bz。
2 磁梯度仪中多个磁通门的互校正模型磁梯度仪原理上要求由2个完全一致的三轴磁通门传感器组成, 实际安装过程中两磁通会有角度偏差。一个磁通门的三维坐标系x2y2z2连续旋转3次可以和另一个磁通门的坐标系x1y1z1一致, 其旋转过程为:第1次绕x2轴旋转α1角, 第2次绕旋转后的y′2旋转α2角, 第3次绕第2次旋转后的z″2轴旋转α3角, 最后产生了另一个坐标系x1y1z1, 如图 2所示。

|
| 图 2 两磁通门坐标旋转变换图 |
机械安装后各轴的旋转角度α1、α2和α3都非常小, 忽略二阶小量, 则磁梯度仪中两磁通门的磁场值B1=[BX1 BY1 BZ1]T和B2=[BX2 BY2 BZ2]T有如下关系
|
(8) |
当磁梯度仪测量N个磁场数据, 会得到如(8)式所示的N个方程组, 当方程组个数大于未知系数个数, 也采用最小二乘法可以求解方程组中的未知系数, 即2个三轴磁通门传感器的旋转角α1、α2和α3。
3 磁通门梯度仪误差校正模型仿真分析为了验证磁通门梯度仪校正算法的可行性, 假设地磁总场为Bsum, 则在理想正交坐标系XYZ下, 三轴分量分别为
|
式中, -90°≤θ1≤90°、0°≤θ1≤360°, 假设地磁场为50 000 nT, 利用Matlab的随机函数rand产生50组θ1和θ2, 2个磁通门传感器的性能参数设置如表 1和表 2所示, 各分量上分别叠加相互独立幅值为0到20 nT的随机噪声, 两磁通门仿真磁场数据之间的旋转角度α1、α2和α3都设置为1°。
| 参数 | 实际值 | 估计值 |
| Δk1 | -0.012 000 | -0.012 203 |
| Δk2 | 0.014 000 | 0.013 614 |
| Δk3 | -0.012 000 | -0.012 569 |
| α | 0.018 000 | 0.018 401 |
| β | 0.021 000 | 0.020 498 |
| γ | 0.013 000 | 0.013 106 |
| bx | 59.000 000 | 72.327 375 |
| by | 67.000 000 | 76.909 460 |
| bz | -85.000 000 | -81.783 688 |
| 参数 | 实际值 | 估计值 |
| Δk1 | 0.016 000 | 0.015 997 |
| Δk2 | -0.012 000 | -0.012 253 |
| Δk3 | 0.016 000 | 0.015 788 |
| α | 0.0180 00 | 0.016 504 |
| β | 0.013 000 | 0.013 536 |
| γ | 0.021 000 | 0.019 330 |
| bx | -85.000 000 | -73.470138 |
| by | 67.000 000 | 83.001 217 |
| bz | 59.000 000 | 62.712 790 |
采用最小二乘法求解(7)式得到两磁通门传感器性能误差参数, 并将预设的实际值与求解的估计值对比, 如表 1和表 2所示。
由表 1可以看出1号磁通门性能参数的估计值和实际值吻合较好, 由表 2可以看出2号磁通门性能参数的估计值和实际值吻合较好, 最小二乘法算法可以很好地实现磁梯度仪中单个磁通门传感器的自校正。
为了验证多个磁通门传感器互较准算法的可行性, 通过最小二乘法求解(8)式后, 对比角度误差参数的实际值和估计值如表 3所示。
| 参数 | 实际值 | 估计值 |
| α1 | 1.000 000 | 0.942 388 |
| α2 | 1.000 000 | 0.971 926 |
| α3 | 1.000 000 | 1.062 702 |
由表 3数据可以看出2个磁通门传感器的角度误差参数的估计值和实际值吻合较好,最小二乘算法很好地实现磁梯度仪中多个磁通门传感器的互校正。
将磁梯度仪的修正参数带入(3)式和(8)式中,可计算出修正后的磁梯度仪三轴差分信号。图 3为磁梯度仪较正前后仿真数据的对比图,可以看出通过磁梯度仪的校准算法处理后,XYZ三轴的仿真数据差分信号波动范围显著减少,与较准前比较分别减少了大约100倍、60倍和70倍。有效降低了磁梯度测量数据的误差,具有理论可行性。

|
| 图 3 较准前后仿真数据对比图 |
为了验证磁通门梯度仪转向差校正算法在实际修正过程中的效果,在学校足球场选取一处地磁环境干扰少的地方作为试验场地。试验过程中将2个三轴磁通门传感器用塑料胶布固定在木杆上构成磁梯度仪,如图 4所示。磁梯度仪中两磁通门传感器的相对位置保持不变,在无磁转台上每10°旋转1次采集磁场数据,完成360°的平面旋转后,总共采集36个点的磁场数据。

|
| 图 4 磁通门梯度仪转向差校正示意图 |
完成磁场数据的采集工作后,利用最小二乘法分别对单个传感器的性能误差进行自校正,得到自校正前后的磁场总量如图 5所示。从图中可以看出:1号磁通门传感器的磁场总量经过单个磁通门自校正处理后波动量从1 539.6 nT下降到23.9 nT;2号磁通门传感器的磁场总量经过单个磁通门自校正处理后波动量从1 543.2 nT下降到22.1 nT。校正效果明显,验证了单个磁通门自校正算法的可行性。

|
| 图 5 单个磁通门自校正处理前后结果对比图 |
单个磁通门传感器的自身性能误差完成自校正后,还需要对多个磁通门传感器的摆放方位误差进行互校正。利用最小二乘法将2个磁通门传感器的磁场数据转换到相同的坐标系下,保证3个轴的指向性一致。磁梯度仪自较正前和完成互较准后对应的三轴地磁场测量值的差分信号如图 6所示。从图中可以看到:X轴分量校正前后波动范围从170.5 nT减少到48.2 nT;Y轴分量校正前后波动范围从248.1 nT减少到155.7 nT,且中心点由1 500 nT左右校正到0 nT附近;Z轴分量校正前后波动范围从1 919.8 nT减少到74.0 nT。磁通门梯度仪通过校正算法处理后,转向误差明显减小。然而磁通度仪在无磁转台上的较准效果还远远没有达到仿真模拟的较准效果,可能原因是磁通门传感器的实际实验中的转向差校正模型还忽略了磁传感器性能随温度的变化、磁通门的剩磁、数据采集存在截断误差以及周围磁环境并不理想等原因。

|
| 图 6 磁通门梯度仪校正处理前后试验结果对比图 |
本文提出的基于最小二乘的磁通门梯度仪误差校正算法,在建立单个磁通门的自校正误差模型和多个磁通门的互校正误差模型的基础上,有效地降低了磁通门梯度仪测量磁场数据的转向差问题。整个校正求解过程不需要恒定磁场测量装置,只需在较为稳定的地磁场环境下采集多组三轴输出数据,具有很好的工程实用价值。
| [1] | Ren Yong, Wang Yangdong, Wang Mijian, et al. A Measuring System for Well Logging Attitude and a Method of Sensor Calibration[J]. Sensors , 2014, 14 (5) : 9256–9270. DOI:10.3390/s140509256 |
| [2] | Gebre-Egziabher D, Elkaim G H, Powell J D, et al. A Non-Linear, Two-Step Estimation Algorithm for Calibrating Solid-State Strapdown Magnetometers[C]//The International Conference on Integrated Navigation Systems, Peterburg Russian, 2001 |
| [3] |
温强, 李怀昆, 赵希人, 等.
双三轴正交测量系配准误差建模与校正研究[J]. 系统仿真学报 , 2009, 21 (5) : 1274–1277.
Wen Qiang, Li Huaikun, Zhao Xiren, et al. Research on Modeling and Correcting Registrational Error between Two Triaxial Intersections Sensor Measurement Systems[J]. Journal of System Simulation , 2009, 21 (5) : 1274–1277. |
| [4] |
刘斯, 曹大平.
基于球形反馈线圈的三轴磁通门磁强[J]. 仪器仪表学报 , 2010, 31 (10) : 2322–2327.
Liu Si, Cao Daping. Three Axial Fluxgate Magnetometer Based on Spherical Feedback Coil[J]. Chinese Journal of Science Instrument , 2010, 31 (10) : 2322–2327. |
| [5] |
胡星星, 藤云田, 谢凡, 等.
磁通门磁力仪背景磁场的自动补偿设计[J]. 仪器仪表学报 , 2010, 31 (4) : 956–960.
Hu Xingxing, Teng Yuntian, Xie Fan, et al. Background Megnetic Field Auto-Compensation of Fluxgate Megetometer[J]. Chinese Journal of Science Instrument , 2010, 31 (4) : 956–960. |
| [6] | Foster C C, Elkaim G H. Extension of a Two-Step Calibration Methodology to Include Non-Orthogonal Sensor Axes[J]. IEEE Trans on Aerospace and Electronic Systems , 2008, 44 (3) : 1070–1078. DOI:10.1109/TAES.2008.4655364 |
| [7] | Crassidis J L, Kok-Lam L, Richard R H. Real-Time Attitude-Independent Three-Axis Magnetometer Calibration[J]. Journal of Guidance Control and Dynamics , 2005, 28 (1) : 115–120. DOI:10.2514/1.6278 |
| [8] | Manon Kok, Jeroen D Hol, Thomas B Schon, et al. Calibration of a Magnetometer in Combination with Inertial Sensors[C]//15th International Conference on Information Fusion, 2012:787-793 |
| [9] | Jun Shi. Adaptive Calibration Algorithm of Three Axial Magnetic Fluxgate Sensor Using Support Vector Regression[C]//2010 Chinese Control and Decision Conference, 2010:4222-4225 http://www.researchgate.net/publication/224151419_Adaptive_Calibration_Algorithm_of_Three_Axial_Magnetic_Fluxgate_Sensor_Using_Support_Vector_Regression |
| [10] | John C Springmann, Janmes W Cutler. Attitude-Independent Magnetometer Calibration with Time-Varying Bias[J]. Journal of Guidance, Control, and Dynamics , 2012, 35 (4) : 1080–1088. DOI:10.2514/1.56726 |
| [11] | Wu Yuanxin, Shi Wei. On Calibration of Three-Axis Magnetometer[J]. IEEE Sensors Journal , 2015, 15 (11) : 6424–6431. DOI:10.1109/JSEN.2015.2459767 |
| [12] |
邱立军, 林春生, 傅霖宇, 等.
基于三轴磁传感器运动噪声消除方法的系数搜索[J]. 海军航空工程学院学报 , 2002, 17 (4) : 422–426.
Qiu Lijun, Lin Chunsheng, Fu Linyu, et al. Coefficient Searching Based on Method for Eliminating Motion Noise of Three-Axial Magnetic Sensors[J]. Journal of Naval Aeronautical Engineering Institute , 2002, 17 (4) : 422–426. |
| [13] |
龙礼, 张合.
三轴地磁传感器误差自适应校正方法[J]. 仪器仪表学报 , 2013, 34 (1) : 161–165.
Long Li, Zhang He. Automatic and Adaptive Calibration Method of Tri-Axial Magmtometer[J]. Chinese Journal of Science Instrument , 2013, 34 (1) : 161–165. |
| [14] |
黄玉, 郝燕玲.
基于FLANN的磁通门总场梯度计误差校正[J]. 华中科技大学学报(自然科学版) , 2011, 39 (5) : 83–87.
Huang Yu, Hao Yanling. Correction of Magnetic Total Field Gradiometer Based on FLANN[J]. Journal of Huazhong University of Science and Technology , 2011, 39 (5) : 83–87. |
| [15] |
黄玉, 郝燕玲.
基于FLANN和最小二乘的磁梯度计误差校正[J]. 仪器仪表学报 , 2012, 33 (4) : 911–917.
Huang Yu, Hao Yanling. Error Correction of Magnetic Total Field Component Gradiometer Based on FLANN and Least-Squares[J]. Chinese Journal of Science Instrument , 2012, 33 (4) : 911–917. |
