

2. 西北工业大学 航天学院, 陕西 西安 710072
人类自20世纪60年代就开始了对高超声速飞行器(hypersonic flight vehicle, HFV)的研究,近年来高超声速飞行器的发展目标主要是高超声速武器和高超声速飞机。和传统亚声速、超声速武器相比,HFV因其飞行速度高而具有作战空间大、探测难度高、突防能力强和杀伤效果好等特点,但随之而来也使得HFV具有强非线性、强耦合和模型不确定性等特性,这给HFV的控制方法研究带来了极大的挑战[1-4]。
随着控制技术理论的不断发展,近年来,越来越多的先进控制技术,如增益调度、滑模控制、鲁棒控制、自适应控制、反步法等都应用到了HFV的控制领域。文献[5]提出了一种高超声速飞行器的高阶滑模控制器设计方法,并详细分析了其稳定性及削弱抖振的方法。文献[6]针对HFV未知动态和执行机构故障带来的问题,研究了基于神经网络的动态面控制方法,并采用了最小学习参数技术,使得在线更新计算量大大降低。文献[7]在具有参数不确定性、测量噪声和外界扰动的情况下,针对HFV的纵向动态研究设计了一种基于滑模扰动观测器的递归终端滑模控制器。Wang等[8]针对弹性吸气式高超声速飞行器指令跟踪控制中存在的不确定性问题,提出了一种连续的有限时间收敛的高阶滑模控制器,并采用非线性扰动观测器对不确定性进行估计补偿。文献[9]针对一类吸气式高超声速飞行器的最小相位模型,设计了一种非线性鲁棒控制器,使得飞行器能够有效地跟踪参考指令。Shao等[10]针对高超声速再入飞行器的姿态控制问题,提出了一种结合基于扩张状态观测器的滑模控制和轨迹线性化控制的新型控制结构,能够达到良好的控制效果。Bialy等[11]针对高超声速导弹具有终端约束的问题,提出了一种基于反演设计方法的自适应控制器。
注意到,上述研究工作虽然针对HFV飞行过程中存在的不确定性和外界干扰等问题,进行了各类控制方法的研究,但都较为繁琐,不易于设计及工程实现。自韩京清教授提出自抗扰控制技术(active disturbance rejection control, ADRC)以来,尤其在工程应用上取得了巨大成果。而扩张状态观测器(extended state observer, ESO)就是自抗扰控制技术的核心部分,它可将系统的不确定性、未建模动态和外部扰动等视为“总和扰动”,并将其扩张成系统变量,然后设计状态观测器来实现对扰动的估计[12]。ESO的结构简单,易于实现,且参数调节简便,为工程应用带来了极大便利。本文采用NASA Langely研究中心所提供的带翼锥形体构型HFV模型,针对模型不确定性和外界干扰的影响,为HFV的纵向通道提出一种基于低阶ESO的非线性动态逆控制器,采用ESO对等效扰动进行精确估计,并在动态逆控制器中进行补偿,以消除其带来的影响,满足指令跟踪的性能要求。
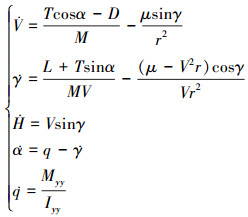
1 HFV纵向运动模型根据文献[13],具有Winged-Cone构型的HFV纵向运动模型如下
|
(1) |
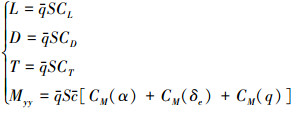
式中:V、γ、H、α、q分别为HFV的速度、航迹角、高度、攻角和俯仰角速率; μ为万有引力常数; r是HFV到地心的距离且r=RE+H, RE为地球半径; M和Iyy分别为HFV的质量及其沿y轴的转动惯量。L、D、T及Myy分别为HFV的升力、阻力、推力及俯仰力矩, 其表达式如下
|
(2) |
式中:q为气动动压, 计算公式为
简化的发动机模型采用一个二阶系统描述

|
(3) |
式中:ξ、ωn分别为二阶系统的阻尼比和自然频率, β、βc分别表示发动机节流阀的实际开度及其指令值。
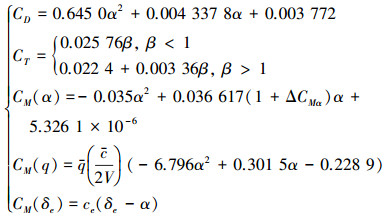
升力系数CL、阻力系数CD、发动机推力系数CT等具有复杂的代数函数表达式, 经转换后可得简化的表达式如下
|
(4) |
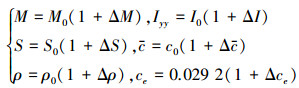
考虑HFV模型的不确定性, 系统参数存在偏移
|
(5) |
式中:“·0”表示参数标称值, “Δ·”表示参数偏移量。
假设(5)式中的参数偏移量是有界的, 其满足
|
(6) |
系统的控制输入为发动机节流阀开度βc和升降舵偏转δe, 系统的输出为速度V和高度H, 速度和高度参考指令分别为Vd和Hd。
2 含ESO的非线性动态逆(NDI)控制器设计 2.1 NDI控制器设计取系统的状态变量为[V, γ, H, α, q, β, 
|
(7) |
将(7)式写成更紧凑形式
|
(8) |
式中: 
假设1 矩阵B满秩。
考虑到HFV在巡航飞行过程中, 飞行航迹角γ≠
|
(9) |
将(9)式代入(8)式中, 得到
|
(10) |
(10)式即为HFV纵向模型通过精确反馈线性化之后得到的逆系统, 如果将(10)式作为HFV纵向模型的反馈控制输入, 就可以得到(9)式, 从而实现对HFV纵向模型的完全解耦控制。
根据上述得到的HFV精确反馈线性化后的模型, 就可以直接设计非线性动态逆控制器如(10)式, 式中v=[v1, v2]T, 其中
|
(11) |
定义速度跟踪误差eV=V-Vd, 高度跟踪误差eH=H-Hd, 并将(11)式代入(9)式当中, 可得闭环系统误差方程为

|
(12) |
其特征方程分别为

|
(13) |
可以看出, 只需要简单、合理的闭环系统的极点配置, 就能使得系统稳定, 速度跟踪误差eV和高度跟踪误差eH能够快速的趋于0。本文中, 为速度通道闭环系统和高度通道闭环系统选择特征方程分别为(s+2)3=0和(s+2)4=0, 故相应的参数为

|
ESO借用状态观测器的思想, 将能够影响被控输出的扰动作用扩张成新的状态变量, 用特殊的非线性反馈机制来观测被扩张的状态, 它并不依赖于生成扰动的具体数学模型, 也不需直接测量其作用, 十分实用。
将HFV的不确定性和外界扰动等效至速度通道和高度通道, 结合(7)式, 可得
|
(14) |
假设2 等效扰动di(t)及其一阶导数有界(i=v, h)。
在前述2.1节中, 通过对HFV纵向运动模型的精确反馈线性化, 可以获得ESO所需信息, 因此可以通过设计简单的二阶ESO来分别对速度和高度通道的等效扰动进行估计补偿。
以速度通道为例, 令x1=

|
(15) |
针对系统(15)建立二阶ESO如下

|
(16) |
式中:zv1和zv2是ESO的输出, 分别估计x1和x2; 非线性函数fal(eveso, 0.5, δ)为原点附近具有线性段的连续幂次函数, 其详细表达式可参考文献[12]。
只要适当的选择参数β01和β02, ESO就能达到很好的估计效果, 当仿真步长确定时, 参数也就基本确定了, 这里取β01=100和β02=300。
同理, 也可以设计高度通道的ESO, 对其等效干扰进行估计补偿, 其参数设置同上。因此, 结合2.1节所设计的动态逆控制器, 可以得到基于ESO的动态逆控制器结构, 如图 1所示。

|
| 图 1 基于ESO的HFV动态逆控制结构框图 |
只需将ESO对速度通道和高度通道的等效扰动估计
|
(17) |
将(17)式代入(14)式中, 可得
|
(18) |
从(18)式中可以看出, 只要等效扰动估计误差趋于0, 就能保证速度、高度通道的闭环稳定性, 从而使速度和高度稳定地跟踪指令信号。
3 仿真验证与分析结合HFV纵向运动模型(1)和Matlab/Simulink工具, 参考美国标准大气(1976年)模型[14], 求取了HFV巡航飞行的一系列平衡点。本文的仿真是基于HFV在33 km高空以15马赫巡航飞行的平衡点数据, 其主要初始参数为高度H为33 km, 速度V为4 565.309 m/s, 航迹角γ为0°, 攻角α为1.954°, 俯仰角速率为0°/s, 控制输入发动机节流阀开度βc为0.181, 升降舵偏角δe为-0.427°。在整个仿真过程中, 由于考虑现实中执行机构的限制, βc限幅在[0,1], δe限幅在[-20°, 20°]。
在本文的仿真过程中, 速度通道给予60 m/s的阶跃信号, 同时在高度通道中给予100 m的阶跃信号, 参考指令信号都通过一个二阶滤波器
|
(19) |
式中:阻尼比ξf=0.9, 自然频率ωnf=0.5 rad/s。
在仿真的第50 s引入等效到发动机节流阀和升降舵面的扰动
|
(20) |
所以

|
(21) |
滑模变结构控制因其具有快速响应、对参数变化及扰动不敏感、设计结构简单等优点,广泛地应用于控制系统设计当中,关于HFV的滑模控制也有大量相关文献。因此,为验证所提出方法的有效性,在同样的仿真条件下,分别采用如下3种不同的控制器结构进行数字仿真,仿真结果如图 2~图 6所示。

|
| 图 2 高度、速度响应曲线 |

|
| 图 3 高度、速度跟踪误差 |

|
| 图 4 攻角、航迹角响应曲线 |

|
| 图 5 控制量变化曲线 |

|
| 图 6 ESO等效扰动估计 |
1) Case 1:本文提出的NDI控制器加ESO估计补偿;
2) Case 2:本文提出的NDI控制器不加ESO估计补偿;
3) Case 3:滑模(SM)控制器加ESO估计补偿。
图 2和图 3分别表示了在3种不同控制器结构作用下,HFV的速度和高度响应曲线及其跟踪误差。
从图中可以看出,基于本文的NDI控制器,无论HFV的速度还是高度响应速度都明显优于传统滑模控制,在所设计的NDI控制器作用下,高度和速度在13 s左右的时候就可以稳定地跟踪到指令值,而传统滑模则需要25 s左右。而当引入等效扰动后,在没有ESO估计补偿作用下,系统发散,不能稳定跟踪指令,而在ESO动态补偿作用下,系统保持稳定。图 3中可以看出,引入等效扰动后,NDI控制器加ESO的控制结构能够保证HFV近乎零误差地跟踪指令信号,而滑模控制器还存在小幅波动。
图 4表示了攻角和航迹角的变化曲线,可以看出,3种情况下攻角和航迹角都能够快速稳定到平衡状态,但滑模控制器却使攻角从初始平衡状态+1.955°变化到了-0.885°,而在NDI控制器作用下攻角则稳定到+1.700°,与初始平衡状态相差不大。在ESO的估计补偿下,能够很好地抑制扰动带来的影响,但是在滑模控制器作用下还存在小幅波动。图 5表示了控制量的变化,在高度和速度稳定跟踪上指令信号后,控制量也稳定在平衡状态,引入等效扰动后,控制量也随之波动,但这样的振荡是为了使HFV能够抑制扰动作用的影响,保持稳定的飞行状态,图 5a)中可以看出,引入等效扰动后,有ESO动态补偿的NDI控制器的βc的响应要明显快于没有ESO的情况。滑模控制器的控制量全程都伴随着高频抖振,这在工程实际中会对执行机构造成极大影响,而NDI控制器则不存在抖振的情况。图 6表示了ESO的等效估计效果,可以看出,所设计的ESO能够高精度估计等效扰动的影响,从而实现其在控制器中的动态补偿。
4 结论本文针对高超声速飞行器巡航飞行时存在的不确定性影响和外界干扰的问题,提出一种基于低阶ESO的非线性动态逆控制方法。在高超声速飞行器巡航飞行过程中,利用ESO对等效扰动进行精确估计,并在控制器中补偿,这大幅提升了控制器的扰动抑制能力和系统的鲁棒性,从而实现了HFV在不确定性和外界扰动的影响下对高度和速度指令的快速、高精度跟踪。仿真实例表明,相比于滑模控制器,本文所设计的基于ESO的NDI控制器具有更快的响应速度和更小的误差,且不存在滑模控制器的控制量高频抖振现象,使得在实际工程应用中能够最大程度降低对执行机构带来的影响,且该方法设计结构简单,参数调节便捷,易于实现,在工程应用上具有一定参考价值。
| [1] |
孙长银, 穆朝絮, 余瑶.
近空间高超声速飞行器控制的几个科学问题研究[J]. 自动化学报 , 2013 (11) : 1901–1913.
Sun Changyin, Mu Chaoxu, Yu Yao. Some Control Problems for Near Space Hypersonic Vehicles[J]. Acta Automatica Sinica , 2013 (11) : 1901–1913. |
| [2] | Wang N, Wu H, Guo L. Coupling-Observer-Based Nonlinear Control for Flexible Air-Breathing Hypersonic Vehicles[J]. Nonlinear Dynamics , 2014, 78 (3) : 2141–2159. DOI:10.1007/s11071-014-1572-1 |
| [3] |
葛致磊, 宋波涛, 郭锐.
基于扰动预测的高超声速飞行器高精度姿态控制器设计[J]. 西北工业大学学报 , 2015, 33 (1) : 123–128.
Ge Zhilei, Song Botao, Guo Rui. High-Precision Attitude Control Design for a Hypersonic Vehicle Based on Disturbance Prediction[J]. Jounal of Northwestern Polytechnical University , 2015, 33 (1) : 123–128. |
| [4] |
王婕.弹性高超声速飞行器跟踪问题控制方法研究[D].天津:天津大学, 2014
Wang Jie. Research on Control Methods for Tracking Problem of a Flexible Hypersonic Vehicle[D]. Tianjin, Tianjin University, 2014(in Chinese) http://cdmd.cnki.com.cn/article/cdmd-10056-1015020038.htm |
| [5] | Zhang Y, Li R, Xue T, et al. An Analysis of the Stability and Chattering Reduction of High-Order Sliding Mode Tracking Control for a Hypersonic Vehicle[J]. Information Sciences , 2016, 348 : 25–48. DOI:10.1016/j.ins.2016.02.012 |
| [6] | Xu B, Zhang Q, Pan Y. Neural Network Based Dynamic Surface Control of Hypersonic Flight Dynamics Using Small-Gain Theorem[J]. Neurocomputing , 2016, 173 : 690–699. DOI:10.1016/j.neucom.2015.08.017 |
| [7] | Wang J, Wu Y, Dong X. Recursive Terminal Sliding Mode Control for Hypersonic Flight Vehicle with Sliding Mode Disturbance Observer[J]. Nonlinear Dynamics , 2015, 81 (3) : 1489–1510. DOI:10.1007/s11071-015-2083-4 |
| [8] | Wang J, Zong Q, Su R, et al. Continuous High Order Sliding Mode Controller Design for a Flexible Air-Breathing Hypersonic Vehicle[J]. ISA Transactions , 2014, 53 (3) : 690–698. DOI:10.1016/j.isatra.2014.01.002 |
| [9] | Fiorentini L, Serrani A. Adaptive Restricted Trajectory Tracking for a Non-Minimum Phase Hypersonic Vehicle Model[J]. Automatica , 2012, 48 (7) : 1248–1261. DOI:10.1016/j.automatica.2012.04.006 |
| [10] | Shao Xingling, Wang Honglun. Sliding Mode Based Trajectory Linearization Control for Hypersonic Reentry Vehicle via Extended Disturbance Observer[J]. ISA Transactions , 2014, 53 (6) : 1771–1786. DOI:10.1016/j.isatra.2014.09.021 |
| [11] | Bialy B, Klotz J, Wiuard Curtis J. An Adaptive Backstepping Controller for a Hypersonic Air-Breathing Missile[C]//AIAA Guidance, Navigation, and Control Conference, Minneapolis, Minnesota, 2012 http://arc.aiaa.org/doi/pdf/10.2514/6.2012-4468 |
| [12] |
韩京清.
自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社 ,2008 .
Han Jingqing. Active Disturbance Rejection Control Technique——the Technique for Estimating and Compensating the Uncertainties[M]. Beijing: National Defense Industry Press , 2008 . |
| [13] | Xu H, Mirmirani M D, Ioannou P A. Adaptive Sliding Mode Control Design for a Hypersonic Flight Vehicle[J]. Journal of Guidance, Control, and Dynamics , 2004, 27 (5) : 829–838. DOI:10.2514/1.12596 |
| [14] |
李慧峰.
高超声速飞行器制导与控制技术[M]. 北京: 中国宇航出版社 ,2012 .
Li Huifeng. Hypersonic Flight Vehicle Guidance and Control Techniques[M]. Beijing: China Astronautic Publishing House , 2012 . |
2. School of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China
