

2. 中国航空工业第一飞机设计研究院, 陕西 西安 710089;
3. 陕西省实验飞机设计与试验技术工程试验室, 陕西 西安 710072
飞行器气动力模型对于飞行器设计的很多任务环节如飞行控制系统的设计等都是必不可少的,其处理结果常被作为新研飞机和改型飞机最终定型的依据[1, 2, 3]。
目前,飞行器气动力参数辨识领域已经存在一些较为经典的算法[2, 3, 4]。传统的参数辨识算法[5, 6, 7, 8]往往假设飞行试验中描述飞行器运动的系统方程不受系统噪声的干扰,然而在实际的飞行试验中系统噪声由于各种原因是不可避免的,强行忽略会产生较大估计误差。针对这种情况,可以采用基于状态增广的滤波方法,如卡尔曼滤波(KF)[9],扩展卡尔曼滤波(EKF)[10],无迹卡尔曼滤波(UKF)[11]和求容积卡尔曼滤波(CKF)[13]等。相对于滤波,平滑方法因为利用更多的量测信息而获得更高精度的估计,例如扩展卡尔曼平滑器(EKS),正反向无迹平滑器[14](URTSS)和求容积卡尔曼平滑器(CKS)[15]等。其中,求容积卡尔曼平滑器估计精度高、计算量相对较小且适用于高维状态量的估计问题,具有一定的优势。
然而,上述滤波器及平滑器在进行参数估计时需要噪声的方差统计特性,而不准确的甚至错误的噪声假设往往对估计结果的精度影响很大,进而影响飞行器气动力参数的辨识。因此,需要另外的方法对噪声协方差及状态的初值等统计量进行估计。期望最大化(EM)算法是由Dempster等[16]提出的极大似然估计的一种经典算法,其数值稳定性好[17]并且应用广泛。因此本文提出一种基于EM和CKS的联合估计算法,其中CKS用于估计状态向量和未知参数,EM算法估计状态均值初值、状态协方差初值和噪声协方差等统计量。 近期,运用EM算法结合估计算法的参数辨识技术也取得了一些进展。Bavdekar等[18]将EM算法与EKF相结合,Schön等[19]将粒子滤波与EM算法相结合,但仍存在精度与计算量等的问题。Yokoyama[20]在2011年提出了将URTSS与EM算法相结合的参数估计技术,并且推导了EM在此类问题中的解析形式,提高了计算精度并减小了计算量;然而URTSS解决高维问题时效果不佳且响应速度慢[20]。因此本文将CKS与EM算法相结合,有望使算法具有性能稳定、精度较高、收敛速度快以及计算量相对较小等特点。
1 问题描述考虑以下非线性离散系统状态空间模型中,对未知参数θ的估计问题:


为了对未知参数进行估计,需要对状态向量进行扩维。状态扩维后的状态向量表示为xk$ \buildrel \Delta \over = $[${\tilde{x}}$kT,θkT]T,原系统方程可重新构造为

将EM算法应用于上述非线性离散系统状态空间模型中,将扩维状态向量XN$ \buildrel \Delta \over = ${xk}1N作为EM中的不可观测数据,量测向量ZN作为EM中的可观测数据,λ为未知统计量。由EM算法的原理可知,其代价函数为

在给定参数λ的条件下,系统状态和观测值得对数联合概率分布为




对L(λ,${\hat{\lambda }}$)关于统计量λ求偏导数,并令其为0即可得到统计量的最优值。在高斯分布的假设条件下,统计量λ有解析解,其具体如下[18]











φi,k|N不仅服从分布p${\hat{\lambda }}$(lk|ZN),同时也服从分布p${\hat{\lambda }}$(xk|ZN),因此可将上述2组Sigma点分别分为φi,k|N=[φi,k|Nx,φi,k|Nθ]T以及Ψi,k+1|N=[Ψi,k+1|Nx,Ψi,k+1|Nθ]T。根据径向求容积规则,可以对(14)~(19)式表示的统计量进行如下计算



至此,EM算法中的统计量${\hat{x}}$1、P1、Q和R已经全部给出。由于计算这些统计量时采用了解析的形式,使得本文所提出的方法较其他平滑方法计算更加简单,不需要执行数值优化算法。从代价函数的表达式可以看出,代价函数L(λ,${\hat{\lambda }}$)与平滑概率密度p${\hat{\lambda }}$(x1|ZN)、p${\hat{\lambda }}$(xk|ZN)以及p${\hat{\lambda }}$(xk,xk+1|ZN)有关。本文中采用基于径向求容积规则的滤波器CKF[13]和平滑器CKS[15]方法对其进行估计,其具体的计算过程见文献[13, 15]。
为了更加简洁明了,本文提出的算法步骤归纳如下:
步骤1 给出${\hat{x}}$1,P1,Q和R的初值;
步骤2 执行CKF和CKS算法,计算p${\hat{\lambda }}$(x1|ZN)、p${\hat{\lambda }}$(xk|ZN)以及p${\hat{\lambda }}$(xk,xk+1|ZN);
步骤3 执行EM算法,更新${\hat{x}}$1,P1,Q,R;
步骤4 计算未知参数的估计值,${\hat{\theta }}$= ;
;
步骤5 若达到收敛条件,则结束;否则返回步骤2。
3 算法在飞机参数辨识中的应用 3.1 ATTAS试验飞机横向线性模型飞机的输入数据取自ATTAS试验飞机的飞行数据,其试验数据及简化线性模型来自参考文献[1]。ATTAS试验飞机的横向线性模型如下所示




仿真输入量(副翼偏转角δσ/(rad)、方向舵偏转角δr/(rad)和侧滑角β/(rad))输入数据的采样时间为15 s,共有750个采样点,采样间隔为0.02 s,其随时间的变化如图 1所示。未知向量Θ的真值如表 1所示。仿真状态向量初值取为量测值的第一组值,即p0=9.662×10-3,r0=-9.856×10-4;初始状态向量协方差为零,即P0=014×14;过程噪声方差和量测噪声方差分别取为Q=10-8I2和R=10-6I2。在上述输入向量及参数设定的基础上,可得到输出(滚转角速率p和偏航角速率r)如图 2所示。

|
| 图 1 输入量随时间的变化 |

|
| 图 2 输出量随时间的变化 |
| Lp | -2.072 | -2.0744 | -2.0744 |
| Lr | 1.019 | 1.0443 | 1.0436 |
| Lδα | -6.334 | -6.3368 | -6.3370 |
| Lδr | 1.195 | 1.1658 | 1.1686 |
| Lβ | -3.800 | -3.7826 | -3.7823 |
| L0 | 0.010 | 0.0105 | 0.0105 |
| Np | -0.170 | -0.1665 | -0.1665 |
| Nr | -0.425 | -0.4303 | -0.4300 |
| Nδα | -0.378 | -0.3738 | -0.3736 |
| Nδr | -1.719 | -1.7699 | -1.7713 |
| Nβ | 3.031 | 3.0165 | 3.0163 |
| N0 | 0.034 | 0.0342 | 0.0342 |
将本文提出的算法(EM-CKS)与文献[20]中的算法(EM-URTSS)用于ATTAS试验飞机的横向线性气动模型进行辨识。算法在MATLAB环境下运行,其最大迭代次数设为i=5 000,并且将达到规定迭代次数作为唯一终止条件。
3.3 实验结果及分析通过仿真实验可知,EM-CKS方法比EM-URTSS算法的计算时长略短,其单步迭代计算机时分别为6.691有s和7.057 s。原因在于EM-CKS方法的Sigma点个数少于EM-URTSS,且在计算Sigma点之前,能够提前对采样点进行计算,其权值为固定值。EM-URTSS方法在计算Sigma点时运算相对于EM-CKS稍显复杂,均值和方差的权值则需分别计算,且每一组点的权值都不相同。
EM-CKS和EM-URTSS参数估计值如表 1所示。
由表中可知EM-CKS与EM-URTSS的估计精度基本一致。2种方法的待估计参数(仅选择其中2个)随迭代次数的收敛曲线如图 3所示。从图 3中能够明显看出,在参数估计结果和估计精度基本一致的情况下,EM-CKS方法的收敛速度显著快于EM-URTSS方法,只需很少的迭代次数就可以达到收敛状态。在2种算法均使用EM进行噪声估计的情况下,这种现象说明本文算法所选用的CKS在保证估计精度的同时,还具有较好的收敛特性。

|
| 图 3 参数随迭代次数的收敛曲线 |
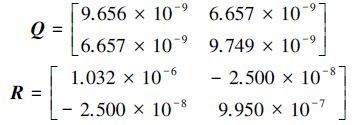
EM-CKS和EM-URTSS方法对噪声方差有着基本类似的估计值,与仿真真值接近,其均为

|
| 图 4 噪声方差的迹随迭代次数的收敛曲线 |
本文提出了基于期望最大化(EM)算法与求容积卡尔曼平滑器(CKS)的联合估计参数辨识算法,对算法进行了详细的推导和设计,给出了算法的计算步骤。算例验证表明,本文提出的算法能够同时对噪声、状态量及未知参数进行估计,具有较好的辨识效果;算法能够有效地应用于飞行器气动参数辨识问题中,通过飞机的输入及响应对飞行器气动模型中的未知参数进行辨识。通过与其他算法在计算性能方面进行对比,发现本文提出的算法辨识精度高、收敛速度快,具有比较明显的优势。
| [1] | Jategaonkar R V. Flight Vehicle System Identification: A Time Domain Methodology[M]. Reston, VA: AIAA, 2006 |
| [2] | Hamel P G, Jategaonkar R V. Evolution of Flight Vehicle System Identification[J]. Journal of Aircraft, 1996, 33(1): 9-28 |
| Click to display the text | |
| [3] | Owens B, Brandon Jay, Croom Mark, et al. Overview of Dynamic Test Techniques for Flight Dynamics Research at NASA LaRC[C]//25th AIAA Aerodynamic Measurement Technology and Ground Testing Conference, Fluid Dynamics and Co-Located Conferences, 2006 |
| Click to display the text | |
| [4] | Iliff K W. Parameter Estimation for Flight Vehicles[J]. Journal of Guidance, Control, and Dynamics, 1989, 12(5): 609-622 |
| Click to display the text | |
| [5] | Kutluay U. An Application of Equation Error Method to Aerodynamic Model Identification And Parameter Estimation of a Gliding Flight Vehicle[C]//AIAA Atmospheric Flight Mechanics Conference, Chicato, Illinois, 2009 |
| Click to display the text | |
| [6] | Rohlfs M. Identification of Non-Linear Derivative Models From Bo 105 Flight Test Data[J]. Aeronautical Journal, 1998,102(1011): 1-8 |
| Click to display the text | |
| [7] | Li C W, Zou X H. Maximum Likelihood Method Based on Interior Point Algorithm for Aircraft Parameter Identification[J]. Jounal of Aircraft, 2005, 42(5): 1355-1358 |
| Click to display the text | |
| [8] | Paris A C, Alaverdi O. Nonlinear Aerodynamic Model Extraction from Flight-Test Data for the S-3B Viking[J]. Journal of Aircraft, 2005, 42(1): 26-32 |
| Click to display the text | |
| [9] | Kalman R E. A New Approach to Linear Filtering and Prediction Theory[J]. Trans on ASME J of Basic Engineering, 1960, 82(D):35-46 |
| Click to display the text | |
| [10] | Jazwinski A H. Stochastic Processes and Filtering Theory[M]. New York: Academic, 1970: 235-237 |
| [11] | Julier S J, Uhlmann J K. Unscented Filtering and Nonlinear Estimation[J]. Proceedings of the IEEE, 2004, 92(3): 401-422 |
| Click to display the text | |
| [12] | Ito K, Xiong K. Gaussian Filters for Nonlinear Filtering Problems[J]. IEEE Trans on Automatic Control, 2000,45(5): 910-927 |
| Click to display the text | |
| [13] | Arasaratnam I, Haykin S. Cubature Kalman Filters[J]. IEEE Trans on Automatic Control, 2009, 54(6): 1254-1269 |
| Click to display the text | |
| [14] | Sarkka S. Unscented Rauch-Tung-Striebel Smoother[J]. IEEE Trans on Automatic Control, 2008, 53(3): 845-849 |
| Click to display the text | |
| [15] | Arasaratnam I, Haykin S. Cubature Kalman Smoothers[J]. Automatica, 2011, 47: 2245-2250 |
| Click to display the text | |
| [16] | Dempster A, Laird N, Rubin D. Maximum Likelihood from Incomplete Data Via The EM Algorithm[J]. Journal of the Royal Statistical Society, 1977, 39(B):1-38 |
| Click to display the text | |
| [17] | Lange K. A Gradient Algorithm Locally Equivalent to the EM Algorithm[J]. Journal of the Royal Statistical Society, 1995, 57(2), 425-437 |
| Click to display the text | |
| [18] | Bavdekar V A, Deshpande A P, Patwardhan S C. Identification of Process and Measurement Noise Covariance for State and Parameter Estimation Using Extended Kalman Filter[J]. Journal of Process Control, 2011,21(4): 585-601 |
| Click to display the text | |
| [19] | Schön T B, Wills A, Ninness B. System Identification of Nonlinear State-Space Models[J]. Automatica, 2011, 47(1): 39-49 |
| Click to display the text | |
| [20] | Yokoyama N. Parameter Estimation of Aircraft Dynamics via Unscented Smoother with Expectation-Maximization Algorithm[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(2): 426-436 |
| Click to display the text |
2. AVIC Aircraft Co., Ltd, Xi'an 710089, China;
3. Experimental Aircraft Design and Flight Testing Lab of Shaanxi, Xi'an 710072, China
