

保证航天器的姿态稳定在期望姿态是航天器完成航天任务的关键问题。航天器的燃料消耗或附件分离,会导致航天器转动惯量发生未知摄动。由于复杂的空间环境和航天器控制器的工程实现,航天器在受到外部环境干扰的同时,还受到执行器饱和的物理限制。为了保证航天器的飞行平稳性,航天器角速度的变化范围也会要求限制在一个足够小的范围内。因此,航天器姿态控制过程,实质上是存在转动惯量摄动、外部环境干扰、控制饱和及角速度有界约束的姿态跟踪控制问题。
航天器姿态跟踪控制的研究成果很多,反演控制[1, 2]、滑模控制[3, 4]、自适应控制[5, 6] 和智能控制[7, 8]等技术广泛应用于航天器姿态控制器的设计。具有较强抗干扰能力的滑模技术主要用来抵消航天器的外部干扰,但滑模控制存在控制力矩较大的缺陷;文献[3]中针对转动惯量摄动,设计了2种滑模自适应姿态控制器,仿真结果显示控制力矩达到104 N·m,不利于实际工程应用。自适应技术通过构建自适应律在线估计存在摄动的转动惯量,从而成为抵消转动惯量摄动的主要设计方法,但需要结合其他控制方法抵消产生的估计误差;文献[5, 6]分别给出了有时间约束和存在时变转动惯量的航天器自适应控制器,解决了存在上界未知转动惯量摄动的姿态控制问题,控制器中采用了滑模技术抵消估计误差。智能控制更多的是作为一种智能补偿器实现对转动惯量摄动的补偿,文献[7, 8]分别给出了神经网络补偿器和模糊逼近器用于转动惯量摄动部分的补偿,但智能补偿器增加了控制器的复杂度。执行器饱和约束控制器中,采用符号函数限幅会增加控制力矩的振荡,饱和函数能缓解但解决不了控制力矩振荡的特性[9],因此文献[10]中给出一阶饱和微分方程,使控制力矩具有连续可导的特性。带有角速度有界约束的姿态控制近些年才受到学者的关注,但是研究成果很少。文献[11]给出一种仅有角速度有界约束的反演控制器,文献[12]给出存在转动惯量摄动和角速度约束的自适应姿态控制器。然而,目前这些研究成果大多是针对转动惯量摄动、外部环境干扰、执行器饱和、角速度有界的某一个或是某几个约束来设计控制器[11, 12, 13, 14],同时考虑4个约束的研究成果并不多,特别是考虑角速度有界约束的研究成果更少。因此,研究存在转动惯量摄动、外部环境干扰、执行器饱和及角速度有界约束下的航天器姿态跟踪控制问题很有必要,具有很大的工程意义。
本文基于反演设计策略,对显式存在控制饱和约束的航天器动力学方程进行变形,设计了一个自适应更新律,用于估计由转动惯量摄动部分、外部干扰和控制力矩超饱和部分构成的不确定项。为克服大的角速度会导致航天器的不平稳性,对运动学子系统预设有界虚拟角速度;并利用障碍Lyapunov函数设计了一种姿态跟踪控制器,将实际角速度对虚拟角速度的跟踪误差,限制在预设范围内,最终保证了航天器角速度的有界性。本文从理论分析了该控制器保证闭环系统的全局渐近稳定性和角速度全程有界的特性。本文的创新之处在于,综合考虑了航天器的外部干扰、转动惯量摄动和物理限制,使控制器具有较强的鲁棒性,且该控制器更适于实际工程需求。利用障碍Lyapunov函数设计控制器,保证航天器实际角速度对有界虚拟角速度的跟踪误差全程有界,有效解决了航天器角速度有界的约束。姿态角收敛平缓,使航天器具有较高的飞行品质。
1 姿态控制问题描述基于单位四元数{q0,q}={q0,q1,q2,q3}的航天器姿态运动方程为[15]


航天器姿态控制问题描述为:在外部干扰‖d‖≤D、角速度满足约束‖ω‖∞≤ωmax和转动惯量J摄动上界未知条件下,对动力学系统(1)、(2)设计控制律u,使闭环系统全局一致渐近稳定。
为简化设计,对(2)变形。记控制力矩u超过umax的部分为δ(t)=[δ1(t),δ2(t),δ3(t)]T,其中[16]


定义1[17, 18]非线性系统$\mathop x\limits^ \bullet $=f(x)在区域Ω内有定义,正函数V(x)在区域Ω内连续可微,若V(x)满足:
1) 当x∈Ω趋近于Ω的边界时(如‖x‖→kb),有V(x)→∞;
2) 存在正常数b,对于初值x(0)∈Ω的=f(x)解x有V(x)≤b;
则定义函数V(x)为障碍李亚普诺夫函数。
引理1[17] 考虑一阶系统=h(t,η),其中函数h(·)和η(·)关于变量t分段连续,关于变量e1满足局部Lipschitz条件。假设存在连续可微的正定函数U(·)和V1(·),使得当‖e1‖→kb1时V1(e1)→∞和γ1(‖ν‖)≤U(ν)≤γ2(‖ν‖),其中范数‖·‖为欧氏范数,γ1(·),γ2(·)为K∞类函数。令V(η)=V1(e1)+U(ν),且‖e1(0)‖<kb1,则如果不等式(7)成立
证明 因为(η)≤0,说明函数V(η)为单调递减函数,则有V(η(t))≤V(η(0))。又V(η)=V1(e1)+U(ν),且V1(e1),U(ν) 正定,则有0≤V(η(t))≤V(η(0)),根据条件可知γ1(‖ν‖)≤U(ν)≤γ2(‖ν‖),所以V1(e1)有界。根据‖e1(0)‖<kb1和‖e1‖→kb1时V1(e1)→∞,可得到e1是有界的,即对任意的t∈[0,∞)满足‖e1(t)‖<kb1。
2 反演自适应姿态控制器设计在子系统(1)中,大的角速度ω输入会产生较大的姿态变化,不能满足航天器的平稳性需求,为限制子系统(1)中的角速度输入,设计如下的虚拟角速度


|
| 图 1 虚拟角速度分量的变化特性 |
下面证明ωv能保证子系统(1)的全局渐近稳定性。设Lyapunov函数



定义实际角速度ω与虚拟角速度ωv的跟踪误差为

设为G的估计值,且估计误差为 。构造如下障碍Lyapunov函数
。构造如下障碍Lyapunov函数
设计反演自适应姿态控制器(back stepping adaptive attitude controller,BSAAC)和不确定项G的自适应更新律


根据Lyapunov稳定性理论容易推出,系统(1)、(2)全局渐近,则定理1成立。
定理1 系统(1)、(2)在控制器(15)和自适应更新律(16)下全局渐近稳定。
因为lim‖e‖∞→ωeV2(e)=∞,且‖e(0)‖∞<ωe,根据引理1,得到如下推论:
推论1在控制器(15)和自适应更新律(16)下,对于t∈[0,∞),ω与ωv的跟踪误差满足‖e(t)‖∞<ωe。
根据e=ω-ωv,‖ωv‖∞≤ωT有‖ω‖∞≤‖e‖∞+‖ωv‖∞,结合推论1的结论有
推论2 当转动惯量J已知时,适当选择参数ωe>0,ωT>0,使ωe+ωT≤ωmax,则在控制器(15)和自适应更新律(16)下,系统(1)、(2)的角速度满足约束条件‖ω‖∞≤ωmax。
推论2说明控制器(15)和自适应更新律(16)实现了航天器的姿态控制目标。为保证系统的稳定性和收敛性,在设计ωe,ωT时,一般尽可能增大ωe,减小ωT。
控制器(15)中的增益系数k1,k2取常值时,在初始姿态角跟踪误差较大时会产生较大的控制力矩,不利于实际工程应用,可以采用变增益的方式对控制器(15)进行修正,本文结合增益变化需求,给出变增益函数为

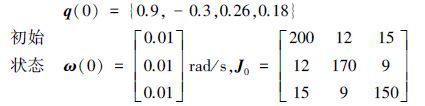
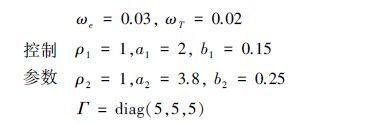
基于如下抓捕航天器基本参数,仿真验证在轨抓捕非合作目标过程中姿态控制器(15)的有效性和鲁棒性。
仿真时间80 s,仿真结果见图 2至图 4。其中图 2为航天器的姿态角变化曲线,图 3为控制器力矩变化曲线,图 4为航天器实际角速度ω与预设虚拟角速度ωv的轨迹曲线。
图 2显示,在反演自适应姿态控制器下,航天器的3个姿态角一直呈递减趋势,最终稳定在0°。整个控制过程中,航天器的姿态角变化比较平缓,没有出现震荡。
图 3显示,在显示控制饱和约束下,控制力矩在刚开始,有两个通道的力矩达到饱和状态,随后逐渐减小,并在±1 N·m内变化。
图 4显示,在姿态控制器的控制下,航天器的实际角速度逐渐逼近预设有界虚拟角速度,并按照预设虚拟角速度的变化趋势进行变化。整个控制过程中,实际角速度的变化范围在±0.03 rad/s,小于角速度的阈值0.05 rad/s。随着姿态角的稳定,最终航天器角速度也收敛到0 rad/s。



仿真结果表明,本文设计的反演自适应姿态控制器能较好地实现航天器姿态稳定控制。该控制器对外部干扰和转动惯量摄动具有较强的鲁棒性。整个控制过程中,姿态角收敛平缓,角速度变化较小,使航天器具有较高的飞行品质。控制力矩较小,满足了执行器饱和约束,使得航天器耗能较小。

|
| 图 2 姿态角变化曲线 |

|
| 图 3 控制力矩变化曲线 |

|
| 图 4 ω和ωv轨迹曲线 |
本文综合考虑了航天器姿态控制过程中的参数摄动、外部干扰和航天器的控制饱和及角速度有界的物理约束,给出一种反演自适应姿态控制器,使姿态控制器更适合实际工程应用。对显式存在控制饱和约束的动力学方程进行变换,将其转换成便于控制器设计的不确定性系统,降低了姿态控制器设计难度。采用反演法,对外环系统预设有界虚拟角速度,并要求内环输出角速度与预设虚拟角速度的跟踪误差有界,确保了航天器实际角速度的有界约束。对复合不确定项设计了自适应控制律,增强了姿态控制器的鲁棒性,扩大了控制器的使用范围。用变增益取代常值增益,减小了控制力矩,降低了耗能。姿态角的平缓收敛和较小的角速度,保证基于本文设计的反演自适应姿态控制器的航天器具有较好的飞行品质。
| [1] | Davila J. Attitude Control of Spacecraft using Robust Backstepping Controller Based on High Order Sliding[C]//AIAA Guidance, Navigation, and Control (GNC) Conference,Boston, MA, 2013,:19-22 |
| [2] |
刘敏,徐世杰,韩潮. 挠性航天器的退步直接自适应姿态跟踪控制[J]. 航空学报,2012,33(9):1697-1705 Liu M, Xu S J, Han C. Direct Adaptive Attitude Tracking Control of Flexible Spacecraft Based on Backstepping Method[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(9):1697-1705(in Chinese) |
| Cited By in Cnki (4) | |
| [3] | Yeh F K. Sliding-Mode Adaptive Attitude Controller Design for Spacecrafts with Thrusters[J]. IET Control Theory and Applications, 2010, 4(7):1254-1264 |
| Click to display the text | |
| [4] | Zhao L, Jia Y M. Finit-Time Attitude Tracking Control for a Rigid Spacecraft Using Time-Varying Terminal Sliding Mode Techniques[J]. International Journal of Control, 2015, 88(6):1150-1162 |
| Click to display the text | |
| [5] | Lu K, Xia Y. Adaptive Attitude Tracking Control for Rigid Spacecraft with Finite-Time Convergence[J]. Automatica, 2013, 49(12):3591-3599 |
| Click to display the text | |
| [6] | Thakur D, Srikant S, Akella M R. Adaptive Attitude-Tracking Control of Spacecraft with Uncertain Time-Varying Inertia Parameters[J]. Journal of Guidance, Control, and Dynamics, 2014(11):1-12 |
| Click to display the text | |
| [7] | Zhong C, Guo Y, Wang L. Fuzzy Active Disturbance Rejection Attitude Control of Spacecraft with Unknown Disturbance and Parametric Uncertainty[J]. International Journal of Control and Automation, 2015, 8(8):233-242 |
| Click to display the text | |
| [8] | Zou A M, Kumar K D, Zeng G H. Quaternion-Based Adaptive Output Feedback Attitude Control of Spacecraft Using Chebyshev Neural Networks[J]. IEEE Trans on Neural Networks, 2010, 21(9):1457-1471 |
| Click to display the text | |
| [9] | Forbes J R. Attitude Control with Active Actuator Saturation Prevention[J]. Acta Astronautica, 2015,107:187-195 |
| Click to display the text | |
| [10] | Yuan R. Robust Adaptive Neural Network Control for a Class of Uncertain Nonlinear Systems with Actuator Amplitude and Rate Saturations[J]. Neuro Computing, 2014(125):72-80 |
| Click to display the text | |
| [11] | Hu Q. Robust Adaptive Backstepping Attitude and Vibration Control with L-2 Gain Performance for Flexible Spacecraft under Angular Velocity Constraint[J]. Journal of Sound and Vibration, 2009, 327(3):285-298 |
| Click to display the text | |
| [12] | Singla P, Singh T. An Adaptive Attitude Control Formulation under Angular Velocity Constraints[C]//AIAA Guidance, Navigation and Control Conference and Exhibit, 2008:67-79 |
| [13] | Hu Q, Li B, Zhang Y. Robust Attitude Control Design for Spacecraft under Assigned Velocity and Control Constraints[J]. ISA Transactions, 2013, 52(4):480-493 |
| Click to display the text | |
| [14] | Zheng Z, Song S. Autonomous Attitude Coordinated Control for Spacecraft Formation with Input Constraint, Model Uncertainties, and External Disturbances[J]. Chinese Journal of Aeronautics, 2014, 27(3):602-612 |
| Click to display the text | |
| [15] | Ahmad B Y, Daniele M, James D T, John L J. Attitude Error Kinematics[J]. Journal of Guidance, Control and Dynamics, 2014(11):330-335 |
| Click to display the text | |
| [16] | Lu K F, Xia Y Q, Fu MY. Controller Design for Rigid Spacecraft Attitude Tracking with Actuator Saturation[J]. Information Scincese, 2013(220):343-366 |
| Click to display the text | |
| [17] | Tee K P, Ge S S, Tay E H. Barrier Lyapunov Functions for the Control of Output-Constrained Nonlinear Systems[J]. Automatica, 2009, 45(4):918-927 |
| Click to display the text | |
| [18] | Xu J X, Xu J. State-Constrained Iterative Learning Control for a Class of MIMO Systems[J]. IEEE Trans on Automatic Control, 2013, 58(5):1322-1327 |
| Click to display the text |
