

为了配合全电飞机的发展,飞机的作动系统由功率液传向功率电传发展。机电作动器(electro-mechanical actuator,EMA)是功率电传作动系统的典型作动器之一,它有重量轻、易维护、适应性强等优点。作动器是作动系统的关键部件,由于EMA是航空领域的一种新型作动器,其故障诊断方法和故障数据还较少,EMA目前多用于辅助舵面的驱动。因此,对EMA展开可靠性分析的研究将对其在飞控领域的广泛应用有重要意义。
目前国内外学者针对EMA的故障诊断算法的研究还比较少。文献[1]使用贝叶斯分类器对EMA进行故障检测和诊断。文献[2]用主元分析法来提取EMA中电机轴承故障特征。文献[3]改进了集合经验模式分解算法,对直驱式EMA振动信号进行处理,提取相应的故障特征,准确诊断复合故障。
故障树分析(fault tree analysis,FTA)是一种快速灵活的可靠性分析方法。传统故障树仅有正常、失效2种状态,而实际系统常伴随着与顺序相关的动态特性,Dugan等[4]提出了动态故障树分析方法(Dynamic FTA,DFTA),并引入了Markov过程和Markov链,用Markov模型求解故障树。Boudali等[5]提出基于离散时间贝叶斯网络的动态故障树分析方法,利用贝叶斯网络推理对故障树进行概率和重要度分析。Merle等[6]利用代数模型工具对动态故障树定性分析进行了尝试,给出了动态故障树的代数表达式。
本文将动态故障树分析法应用于EMA上,结合Vague集理论,建立了EMA的Vague动态故障树。首先给出了Vague故障树分析公式;然后推导了动态逻辑门的代数模型,提供了常用的运算律;接着建立了EMA的动态故障树,并用三角形Vauge集对事件的可靠性进行描述。最后给出了可靠性分析结果,证明基于代数模型的Vague动态故障树能够实现对EMA的可靠性分析。
1 Vague故障树分析本文将Vague集的概念引入到EMA的可靠性分析中,Vague集的定义为:
定义1 设X是一个对象空间(论域),对于x∈X,X上的Vague集V由一个真隶属度函数tV和一个假隶属度函数fV表示,其中

故障树分析中,最后所有的逻辑门均化为与门和或门的组合形式,与门和或门的模糊算子为(2)式和(3)式所示。



|
| 图 1 三角形Vague集 |
三角形Vauge集的与门和或门模糊计算分别表示为
底事件Xi的模糊重要度反映了其对顶事件的影响程度,其计算公式为



本文采用基于代数模型的动态树分析方法,引入时间算子[6],能充分表达故障发生的顺序特性,给出了动态逻辑门的通用代数表达,有利于动态故障树的统一表示,方便求解。
2.1 算子定义及逻辑门的代数模型常规的静态故障树的逻辑门不能体现系统中的顺序相关性问题,动态故障树引入一系列带有时序性的逻辑门,能充分表达故障发生的顺序关系。
定义2 失效时刻:假设所有事件都是不可修复的,定义事件X失效的时刻为t(X),失效时刻是表征事件动态特征的唯一特征量。
定义3 时序算子*:事件X1与事件X2同时发生时,用X1*X2表示。
定义4 时序算子◁:当事件X1发生于事件X2之前时,用X1◁X2表示这一组严格不包含的时间顺序的逻辑。
定义5 时序算子◁:当事件X1发生于事件X2之前时,用X1◁X2表示这一组可以包含的时间顺序的逻辑。
分别用“+”和“·”表示“或”和“与”逻辑。假设有n个输入事件X1,X2,…,Xn,则


动态逻辑门主要包括优先与门(priority-and,PAND)、功能相关门(functional dependency gate,FDEP)、顺序相关门(sequence enforcing gate,SEQ)和备件门(spare,SP)这4种,具体的功能和失效机理详见文献[4]。
设PAND有两个输入事件X1和X2,则


对于一个FDEP,设触发事件为X,n个相关事件X1,X2,…,Xn,则


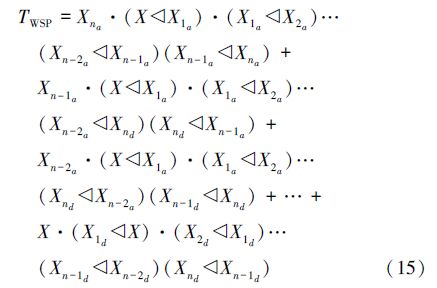
备件按照失效机理不同分为冷备件(cold spare,CSP)、温备件(warm spare,WSP)和热备件(hot spare,HSP)3种。设X1,X2,…,Xn为X的n个备件,Xia表示配件Xi处于激活状态下的失效事件,Xid表示配件Xi处于休眠状态下的失效事件则


温备件门不同于冷备件门的是备件在进入工作状态之前就有可能失效,其失效顺序有(n+1)!种,则

热备件门的基本输入和备件同时处于工作状态,则


由于顺序相关门可以看成是冷备件门的一种特殊形式,所以本文不重复推导顺序相关门的代数逻辑。
2.2 运算律推导本节将讨论上节介绍的几种算子的运算规则,假设X、Y和Z为三基本事件,下文将分别讨论其是否符合幂等律、交换律、结合律和分配律,并推导一些化简公式。
对于“与”、“或”逻辑的运算律推导已经非常成熟,因此仅对时序算子“◁”做推导,余下的运算律可以分情况一一证明。
证明:“◁”不满足幂等律:由算子“◁”的定义可知,对于任意非空事件,如果t(X)=t(Y),那么X◁Y=$\phi $。因此,X◁X≠X,算子“◁”不满足幂等律。
“◁”不满足结合律:若t(X)=t(Y)>t(Z),则t((X◁Y)◁Z)=∞,t(X◁(Y◁Z))=t(X),(X◁Y)◁Z≠X◁(Y◁Z),算子“◁”不满足结合律。
“·”对于“+”满足分配律,同时“+”对于“·”也满足分配律。而时序算子中,“◁”和“◁”对于“+”、“·”和“*”满足右分配律。现给出“◁” 对于“*”的推导过程。

动态故障树中系统的失效不仅与基本事件的逻辑组合有关,还与基本事件的发生顺序有关。通过对动态故障树顶事件的结构函数进行规范化处理,获得最小割序集(minimal cut sequence Set,CSS)能够有效的进行故障分析。
动态故障树的顶事件结构函数的标准形式可以表示为

动态故障树结构函数规范化的算法流程图如图 2所示,其中割序集的个数为n,输入为顶事件的标准结构函数,输出为其标准形式。

|
| 图 2 结构函数规范化的算法流程图 |
借鉴传统的故障树分析方法,基于代数模型的Vague动态故障树的分析步骤如下:
1) 确定顶事件,根据故障发生原理选择中间事件和底事件,使用逻辑门构造动态故障树;
2) 通过可靠性手册、专家经验数据等获得各底事件的Vague集可靠性数据;
3) 从故障树的顶部开始,将逻辑门替换成算子,建立故障树的代数模型;
4) 按照代数模型的运算律和化简原则,得到故障树的规范形式;
5) 将故障树分为静态部分和动态部分,根据Vague模糊运算得到静态部分的模糊可靠性数据,根据代数模型得到动态部分的失效概率函数。
6) 将静、动态部分结合,分析系统的可靠性。
3.2 EMA结构及工作原理EMA由可双向调速的伺服电机、控制单元和机械减速装置组成,其结构原理图如图 3所示。控制单元通过相电流关系控制电机的转速,然后由机械减速装置将高速低转矩的电机输出转换成低速大转矩的转动输出到舵面。

|
| 图 3 EMA的结构框图 |
基于EMA的结构及原理,建立如图 4所示以EMA失效为顶事件T的动态故障树,各个中间事件的描述见表 2。EMA系统是由机、电各子系统组成的复杂系统,各零部件由于磨损、疲劳和老化等因素导致了故障特征具有一定的模糊性,底事件的Vague集可靠性数据能充分考虑底事件概率水平的不确定性,详见表 3。

|
| 图 4 EMA的动态故障树 |
| 底事件编号 | 故障名称 | 可靠性数据10-6/h | 不确定性度量 | |||||
| a | a′ | b | c′ | c | t | 1-f | ||
| X1 | 绕阻开路 | 0.7 | 0.8 | 1 | 1.2 | 1.3 | 0.8 | 0.85 |
| X2 | 绕阻短路 | 0.8 | 0.9 | 1.1 | 1.3 | 1.4 | 0.75 | 0.9 |
| X3 | 传感器主件失效 | 0.05 | 0.15 | 0.3 | 0.45 | 0.5 | 0.8 | 0.9 |
| X4 | 传感器备件失效 | 0.05 | 0.15 | 0.3 | 0.45 | 0.5 | 0.8 | 0.9 |
| X5 | 轴承弯曲 | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.9 | 1 |
| X6 | 轴承磨损 | 0.15 | 0.5 | 1 | 1.5 | 1.85 | 0.85 | 0.95 |
| X7 | 转子偏心 | 0.15 | 0.5 | 1 | 1.5 | 1.85 | 0.8 | 0.9 |
| X8 | 功率管开路 | 0.05 | 0.15 | 0.3 | 0.45 | 0.6 | 0.65 | 0.85 |
| X9 | 功率管短路 | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.75 | 0.9 |
| X10 | 机械磨损 | 0.2 | 0.5 | 1 | 1.5 | 1.8 | 0.8 | 1 |
| X11 | 堵塞或卡死 | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.7 | 0.85 |
根据图 4,得到EMA的动态故障树顶事件的代数表达式
将(21)式中动态部分提出,记为TD,则

根据化简规则,(22)式可化简为

则系统静态部分TS为

根据(4)式和(5)式,求得失效时间为10 000 h下静态部分和事件的可靠性数据为

根据(6)式求得各底事件的模糊重要度,排序为

系统的动态部分TD变为

根据割序集冗余判断准则,知动态部分不冗余,为最小割序集结构,根据代数表达计算其失效概率。




|
| 图 5 动态部分的状态转移图 |
如图 5为动态部分的状态转移图,状态3是故障状态,其状态转移矩阵分别为Q。
将动态部分提取出来求解,避免了整体求解的巨大运算量。同时使用代数模型,具有统一的代数表达,用代数求解避免了Markov求解高阶微分方程组的运算量爆炸问题。
根据(26)式和(31)式,结合Vague运算(5)式,得到在不同截集水平下的系统模糊失效概率,分布如图 6所示。由图可以看出,给定不同的隶属度,由于系统静态部分和动态部分的Vague度的差异,导致系统失效概率在一定范围内波动,刻画出了底事件的不确定性对顶事件的影响,同时也可以看出使用Vague集故障树得到的结果差距更小。

|
| 图 6 系统的模糊失效概率的隶属函数(t=10 000 h) |
基于新型机电作动器,本文提出了一种基于代数模型求解的Vague动态故障树EMA可靠性分析方法。结合Vague集理论描述了EMA系统失效行为随机性和不确定性,允许一定程度的误差。用代数模型求解系统动态部分的失效概率,具有一定的通用性,避免了Markov方法求解高阶微分方程组的复杂性。将EMA故障树分解为静态和动态部分,缓解了整体求解的计算量大的问题。分析结果表明算法验证了算法的有效性和灵活性,为机电作动器的提供了有效的故障定位思路。
| [1] | Chirico A J, Kolodziej J R. A Data-Driven Methodology for Fault Detection in Electromechanical Actuators[J]. Journal of Dynamic Systems, Measurement, and Control, 2014, 136(4): 041025 |
| Click to display the text | |
| [2] | Sridhar R, Kolodziej J R, Hall L. Bearing Fault Detection in Electromechanical Actuators from Empirically Extracted Features[C]//AIAA Atmospheric Flight Mechanics (AFM) Conference, 2013 |
| [3] | 王占林, 刘俊, 付永领,等. 基于EEMD分解的直驱式机电作动器故障诊断[J]. 北京航空航天大学学报, 2012, 38(12): 1567-1571 Wang Zhanlin, Liu Jun, Fu Yongling, et al. Fault Diagnosis of Direct-Driven Electromechanical Actuator Based on Ensemble Empirical Mode Decomposition[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(12): 1567-1571 (in Chinese) |
| Cited By in Cnki (4) | Click to display the text | |
| [4] | Bechta Dugan J, Bavuso S J, Boyd M A. Dynamic Fault-Tree Models for Fault-Tolerant Computer Systems[J]. IEEE Trans on Reliability, 1992, 41(3): 363-377 |
| Click to display the text | |
| [5] | Boudali H, Dugan J B. A Discrete-Time Bayesian Network Reliability Modeling and Analysis Framework[J]. Reliability Engineering & System Safety, 2005, 87(3): 337-349 |
| Click to display the text | |
| [6] | Merle G, Roussel J M, Lesage J J. Algebraic Determination of the Structure Function of Dynamic Fault Trees[J]. Reliability Engineering & System Safety, 2011, 96(2): 267-277 |
| Click to display the text | |
| [7] | Gau W L, Buehrer D J. Vague Sets[J]. IEEE Trans on Systems, Man, and Cybernetics, 1993, 23(2): 610-614 |
| Click to display the text | |
| [8] | Pandey D, Sharma M K. Vague Set Theoretic Approach to Fault Tree Analysis[J]. Journal of International Academy of Physical Sciences, 2010, 14(1): 1-14 |
| Click to display the text | |
| [9] | Ni J, Tang W, Xing Y. A Simple Algebra for Fault Tree Analysis of Static and Dynamic Systems[J]. IEEE Trans on Reliability, 2013, 62(4): 846-861 |
| Click to display the text | |
| [10] | 黄洪钟, 李彦锋, 孙健, 等. 太阳翼驱动机构的模糊动态故障树分析[J]. 机械工程学报, 2013, 49(19): 70-76 Huang Hongzhong, Li Yanfeng, Sun Jian, et al. Fuzzy Dynamic Fault Tree Analysis for the Solar Array Drive Assembly[J]. Journal of Mechanical Engineering, 2013, 49(19): 70-76 (in Chinese) |
| Cited By in Cnki (3) | Click to display the text |
