

2. 航宇救生装备有限公司, 湖北 襄阳 441003
第4代弹射座椅的首要任务之一是解决低空不利姿态的救生问题[1],这就需要弹射座椅具备快速调整姿态的能力,通过姿态调整使弹射座椅能够获得尽可能大的对地推力矢量,从而增加救生高度,提升飞行员的安全性[2]。
美国自20世纪70年代就着手第4代弹射座椅的研制,但由于推力矢量控制技术瓶颈,目前仍未实现工程化。而在20世纪90年代末,美国以ACES Ⅱ座椅为原型,提出了以“H”形火箭包为动力基础的第4代弹射座椅概念。不同于传统控制模式,置于座椅背部的“H”形火箭包配有4个固定的火箭喷口,在各喷口两两对偶的推力矢量控制模式下,通过各喷口之间产生的推力矢量差值,可同时为弹射座椅提供所需推力及姿态控制所需力矩[3, 4, 5]。“H”形火箭包将传统的主推力火箭和姿态控制火箭控制模式融为一体,从而提高了推力矢量的利用效率,为弹射座椅的快速姿态调整能力提供了新的思路。
但是国内外对“H”形火箭包姿态控制算法的研究较少,且并未有效解决低空不利姿态的救生问题。这是由于“H”形火箭包结构上的特殊性,导致其姿态控制算法设计面临一些复杂因素,例如姿态控制力矩的耦合问题及分配策略问题,这将严重影响弹射座椅的救生性能。对此,本文提出了基于模糊算法的分时控制策略,通过对“H”形火箭包火箭喷口安装角度的优化实现了姿态控制力矩的解耦,再利用所设计的模糊算法对弹射座椅姿态进行分时控制,最后在Matlab平台上对弹射座椅低空不利姿态的快速调整能力进行仿真分析。仿真结果表明,该算法能够有效提升弹射座椅低空不利姿态的救生能力。
1 弹射座椅六自由度数学模型为了简化和推导运动方程时,本文做以下基本假设:
1) 假定弹射座椅是一个刚体;
2) 略去飞机对弹射座椅气动特性的影响;
3) 略去地球哥氏加速度的影响,并认为重力加速度是常量;
4) 准定常假设,弹射座椅在任一瞬间所受的力和力矩均由该瞬间所处的运动状态决定,而不考虑运动状态随时间变化的影响。
根据相关文献及航宇救生装备有限公司所提供的技术资料,“H”形火箭包的结构如图1所示。
 |
| 图 1 “H”形火箭包结构(体轴坐标系) |
“H”形火箭包弹射座椅六自由度数学模型如下[6, 7, 8, 9]:
“H”形火箭包推力作用在体轴坐标系下3个轴向的推力分量为:
式中,αh为喷口向下与壳体轴线的夹角,βh喷口向内与纵向平面的夹角;Fh为“H”形火箭包的总推力大小。
弹射座椅所受合力作用的方程组为:
式中,m为弹射座椅的质量;Vxt、Vyt、Vzt为体轴系下弹射座椅速度分量;ωxt、ωyt、ωzt分别为体轴系下弹射座椅绕3个轴转动的角速度;气动力Q、P、R分别为轴向力、法向力和侧向力;G为弹射座椅的重力;弹射座椅的姿态角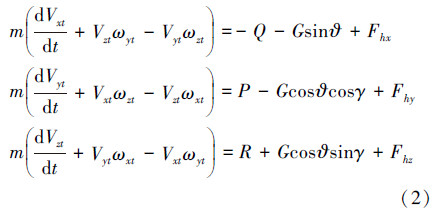
 、ψ、γ分别为俯仰角、偏航角和滚转角。
、ψ、γ分别为俯仰角、偏航角和滚转角。
将(2)式转换到地面坐标系下可得弹射座椅质心动力学方程组:


弹射座椅绕质心转动的动力学方程组为:
式中,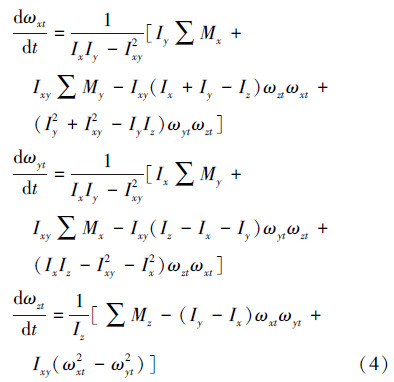
 分别为体轴系下3个方向的合力矩;Ix、Iy、Iz、Ixy为相应的转动惯量。
分别为体轴系下3个方向的合力矩;Ix、Iy、Iz、Ixy为相应的转动惯量。
弹射座椅姿态角控制方程组为:
2 姿态控制算法设计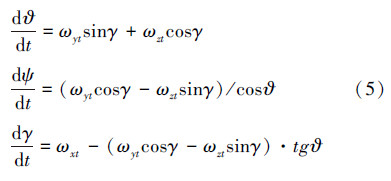
为了保证其内压的平衡,“H”形火箭包采用的是各喷口两两对偶的推力矢量控制模式,且喷口的安装角度一旦确定并不再改变,因此各姿态角的姿态控制力矩之间存在耦合情况,不利于控制算法的设计。对此,本文采用分时控制的策略,通过优化喷口安装角度实现姿态控制力矩的解耦。
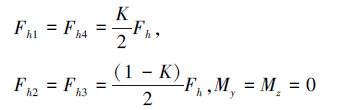
2.1 分时控制策略根据分时控制策略,“H”形火箭包共有4种控制模式,每种模式下各喷口(1、2、3、4分别对应图1中的左上、右上、左下、右下喷口)推力及力矩大小为:
稳定控制模式:

俯仰控制模式:

偏航控制模式:

滚转控制模式:
由于”H”形火箭包的姿态控制是为了尽快调整弹射座椅的姿态角,使其处于对地竖直推力分量最大的状态,以提升救生高度;又由于4个喷口所产生的推力为弹射座椅的唯一控制动力来源,因此弹射座椅控制系统的输入为其瞬时姿态角,输出为各喷口的推力大小(即分配系数K)。传统的PID等算法无法通过瞬时姿态角与期望姿态角的差值直接解算出所需力矩的大小,因此无法进行误差跟踪。而模糊算法则可以通过模糊控制量将姿态角差值与分配系数K直接联系起来,从而实现弹射座椅的姿态控制。模糊控制算法的实现过程如下:
2.2.1 姿态角期望值为了使座椅对地向上运动,应使火箭包喷口推力对地分量尽可能大。此时滚转角γ的期望值明显为零,俯仰角 的期望值需要结合优化后的喷口安装角度计算得到,而偏航角ψ则没有影响。因此控制对象 ,γ的期望值为( *,0)。
输入E为姿态角瞬时值与期望值之间的差值,归一化到[-3,3]为:

输入Ec为体轴系下的角速度,归一化到[-3,3]为:
式中,ω表示座椅绕各体轴转动的角速度,[ωmin,ωmax]表示角速度的取值范围。
输出U为分配系数K,而K的取值范围为[0.1,0.9],则有:

输入E、Ec及输出U的隶属度函数均选取三角形函数(见图2):
2.2.3 模糊规则表针对弹射座椅的实际应用情况,本文采用的模糊规则见表1:
| Ec | E | ||||||
| NB | NM | NS | Z | PS | PM | PB | |
| NB | NB | NB | NM | NM | NM | NS | Z |
| NM | NB | NM | NM | NM | NS | Z | PS |
| NS | NM | NM | NS | NS | Z | PS | PM |
| Z | NM | NS | NS | Z | PS | PS | PM |
| PS | NM | NS | Z | PS | PS | PM | PM |
| PM | NS | Z | PS | PM | PM | PM | PB |
| PB | Z | PS | PM | PM | PM | PB | PB |
本文采用的是重心解模糊化的方法,模糊控制量为:
式中,Ui为隶属度。 2.2.5 模糊控制基本步骤
模糊控制算法的实施步骤为:
1) 在每一控制时刻开始时,获得弹射的瞬时姿态,选择控制模式;
2) 根据被控对象瞬时值与期望值的差及其变化率,通过式(6)~(8)来确定2个输入量E和Ec;
3) 根据表1及(10)式解算出模糊控制量U,根据(9)式得到分配系数K,利用K值所分配的火箭包喷口推力对座椅进行控制,该控制时刻结束;
4) 下一控制时刻开始时返回步骤1),直至整个控制过程结束。
2.2.6 模糊控制算法优化在模糊控制算法中,由于“H”形火箭包结构上的局限,导致弹射座椅在某些初始状态下的姿态控制效果不理想,因此需要对姿态控制算法进行优化。
1) 气动补偿
在带俯冲角的初始状态下,俯仰角需要进行大幅度的状态调整,而由于弹射座椅速度方向的变化远远跟不上俯仰角的变化速度,导致其处于大攻角飞行的状态。这将在俯仰控制通道上产生较大的气动干扰力矩,使得俯仰角无法实现持续提升,从而对最低安全高度产生负面影响。因此,需要对模糊控制量进行补偿:
通过给模糊控制量U增加一个ΔU值,即U′=U+ΔU,分配系数将变为K′=K+ΔK,此时ΔK产生的俯仰力矩增量应恰好能抵消气动力矩的干扰。也就是说,ΔU的值可通过瞬时的气动干扰力矩计算得出。
2) 救生时机选择
在不利飞行状态下,由于弹射座椅通过姿态控制所提升的高度无法弥补控制过程中损失的高度,因此需要对救生伞的射出时机进行优化处理:
a) 低速不利姿态下直接射伞;
b) 高速状态下利用气动减速到600 km/h以下后直接射伞;
c) 其他姿态采用控制算法控制后射伞。
3 仿真结果及分析本文的仿真工作在Matlab/Simulink仿真环境下,根据国军标1800A-2007“弹射座椅型乘员应急离机救生系统通用规范”规定的120 种弹射状态,通过弹射座椅弹射后离地高度的变化曲线和最低安全高度的概念来验证姿态控制算法的性能。
根据本文所优化的喷口角度,弹射座椅俯仰角为55°时,”H”形火箭包竖直对地的推力分量最大,因此将俯仰角的期望值设为 *=55°。
首先,在几种较典型的弹射状态下进行仿真,仿真过程中不同弹射状态下弹射座椅弹射后离地高度变化曲线如图3~图6所示:
 |
| 图 3 条件a)下离地高度变化曲线 |
 |
| 图 4 条件b)下离地高度变化曲线 |
 |
| 图 5 条件c)下离地高度变化曲线 |
 |
| 图 6 条件d)下离地高度变化曲线 |
从上述仿真结果可以看出,根据姿态控制算法的结果,座椅弹射高度方面有了较大的改善,平均提升了近70 m。从图中还可以看出,由于姿态控制算法的优化中加入了俯仰气动补偿,因此姿态控制算法对俯仰姿态的控制效果比较明显;而滚转姿态的控制效果不太理想,因此需要利用优化算法中救生时机的选择策略来进一步改善。
根据文献[10]提供的不利姿态条件下ACES II、K36D-3.5A 的最低安全高度要求,将本文的仿真结果与其进行对比,如表2所示。仿真结果中最低安全高度的计算方法为:弹射时的高度减去降落伞第1次张满瞬间的离地高度,如果弹射过程中有高度损失,则加上这一高度。
| 序号 | 飞机姿态 | 速度(KEAS) | 最低安全高度/(ft) | |||
| 俯冲角/(°) | 横滚角/(°) | ACES II | K36D-3.5A | 仿真值 | ||
| 1 | 0 | 60 | 120 | 0 | 0 | 0 |
| 2 | 0 | 180 | 150 | 150 | 96 | 80 |
| 3 | 0 | 0 | 150 | 116 | 137 | 76 |
| 4 | 60 | 0 | 200 | 335 | 288 | 301 |
| 5 | 30 | 0 | 450 | 497 | 518 | 496 |
| 6 | 60 | 60 | 200 | 361 | 299 | 342 |
| 7 | 45 | 180 | 250 | 467 | 323 | 353 |
| 注:1. 此时飞机具有10 000 ft/min 的下沉率;2. KEAS 为节当量空速,1knot=1.85 km/h。 | ||||||
从表中数据可以看出,前3种状态下,仿真结果的最低安全高度均优于ACES II和K36D-3.5A;其余情况则都优于ACES II。
在国军标1800A-2007规定的120种状态中,共有88中低速状态。经过仿真比较,共有65中情况得到了改善,能够满足国军标的要求,约占74%。但是对于国军标1800A-2007所规定的32种高速状态,通过仿真比较,满足其中的14种状态的最低安全高度,仅占了44%。这是由于弹射救生过程中座椅所受到的气动力矩(约为15 000 Nm)远大于火箭包控制力矩(约为2 300 Nm),此时的控制系统基本失效,只能通过气动阻力的作用使弹射座椅减速至满足弹射状态的飞行状态,因此最低安全高度的改善效果不如低速状态的明显。
4 结 论本文在“H”形火箭包的动力基础上,建立了弹射座椅的数学模型。在此基础上,根据其结构及控制模式的特点,基于分时控制策略,以模糊控制理论设计了弹射座椅姿态控制算法,以实现其快速调整姿态的能力,从而提升其低空不利姿态的救生性能。
通过仿真分析,研究了姿态控制算法对弹射座椅弹射高度的影响,并以最低安全高度为指标,将姿态控制算法的仿真结果与K36D-3.5A和ACES II座椅作了对比,结果表明,在最低安全高度方面本文算法接近前者而优于由于后者。
通过与国军标1800A-2007中所规定的120种状态及所要求的最低安全高度的对比,低速状态有65种能够满足,约占74%;高速状态有14种能够满足,仅占44%。分析结果表明,本文所设计的姿态控制算法能够有效的改善低速状态下弹射座椅的救生性能,而对于高速状态的改善效果不甚明显,尚需探索新的方案。
| [1] | 封文春,林贵平. 弹射座椅多参数多模态控制仿真分析[J]. 系统仿真学报, 2007, 19(10): 2283-2286 Feng Wenchun, Lin Guiping. Multi-Parameter and Multi-Mode Control Simulation Analyses of Ejection Seat[J]. Journal of System Simulation, 2007, 19(10): 2283-2286 (in Chinese) |
| Cited By in Cnki (3) | Click to display the text | |
| [2] | 郁嘉,林贵平,毛晓东. 弹射救生数值仿真及不利姿态下救生性能分析[J]. 航空学报, 2010, 31(10): 1927-1932 Yu Jia, Lin Guiping, Mao Xiaodong. Numerical Simulation of Ejection Seat and Analysis of Performance under Adverse Attitudes[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(10): 1927-1932 (in Chinese) |
| Cited By in Cnki (2) | Click to display the text | |
| [3] | Brinkley J W, Shaffer J T. Dynamic Simulation Techniques for the Design of Escape Systems: Current Applications and Future Air Force Requirements[R]. Aerospace Medical Research Lab Oratory, AMRL Technical Report 71-292, Wright-Patterson Air Force Base, Ohio, 1971 AD740439 |
| Click to display the text | |
| [4] | McDonald A B. 4TH Generation Escape System Technologies Demonstration Phase II[R]. Boeing co st Louis Mo, 1998 |
| Click to display the text | |
| [5] | Stewart D, Sabo B, Cromer W. ACES II Pre-Planned Product Improvement (P3I) Program Update[R]. Armstrong Lab Brooks Afb Tx Human Systems Program Office, 2004 |
| Click to display the text | |
| [6] | 吴铭. 自适应座椅仿真数学模型研究报告[R]. 襄阳:航宇救生装备有限公司,2013 Wu Ming. Research Report of the Simulation Model of the Adaptive Seats[R]. Xiangyang: Aerospace Life-Support Industries, LTD, 2013 (in Chinese) |
| [7] | 李宝峰. 战斗机弹射救生人椅系统的数字仿真研究[D]. 西安:西北工业大学,2005 Li Baofeng. Simulation Research of the Ejection Seats[D]. Xi'an: Northwestern Polytechnical University, 2005 (in Chinese) |
| Cited By in Cnki (3) | |
| [8] | 袁文明. 弹射座椅姿态控制方案研究[D]. 南京:南京航空航天大学,2009 Yuan Wenming. Research on Attitude-Control Project of the Ejection Seats[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009 (in Chinese) |
| Cited By in Cnki (3) | |
| [9] | 蒋伟. 基于Matlab弹射救生系统全过程仿真研究[D]. 南京:南京航空航天大学,2012 Jiang Wei. The Whole Trajectory Simulation Research of Ejection Seat and Occupant System with Matlab[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012 (in Chinese) |
| Cited By in Cnki | |
| [10] | Barnette Bill, Peterson Kevin L. MAXPAC Update and Lessons Learned[C]//Proceeding of the 36th Annual SAFE Symposium, America: SAFE Association, 1998 |
| Click to display the text |
2. Aerospace Life-Support Industries, LTD, Xiangyang 441003, China