

2. 西北工业大学 无人机特种技术重点实验室, 陕西 西安 710065
高空长航时太阳能无人机的机翼展弦比很大、结构面密度很小,因此是超柔性的结构,其结构弹性振动很明显,严重影响了飞行安全,同时,由于超柔性机翼的结构振动频率很低,会与飞行动力学响应耦合,从而改变了无人机的动力学响应特性[1],未变形的刚性模型不能预测弹性模型中的飞行动力学不稳定现象[2]。
高保真的弹性无人机模型阶数上百阶[3],不利于在总体设计阶段对无人机方案进行快速评估,因此需要根据实际需要进行简化。大展弦比无人机的机身刚度比机翼大得多,所以只考虑机翼的气动弹性,机翼的气动弹性运动主要有垂直弯曲、扭转和水平弯曲3种[4],而对无人机稳定性影响较大的是前两者,所以在总体方案和控制律设计阶段,可以只考虑机翼的垂直弯曲和扭转变形。大展弦比柔性机翼的变形具有大位移小应变的特点[5],在大变形的情况下转动惯量的变化会对飞行品质造成很大的影响,因此还必须考虑机翼变形后的转动惯量变化的因素[6]。
为了明确无人机在不同的结构特性下的稳定性,为总体设计、结构设计等进一步优化提供参考,还应深入研究不同的刚度特性对无人机纵向稳定性的影响,并根据稳定性特点进行控制特性研究。
在本文的研究过程中,突出了刚性、静气动弹性和完全弹性3类模型的对比分析,以及机翼结构刚度变化对纵向根轨迹的影响。所采用的方法和结论可为超柔性太阳能无人机的总体设计、结构设计、动力学分析、飞行控制系统设计提供一定的参考。
1 无人机的建模 1.1 运动方程超柔性太阳能无人机的动力学模型必须同时考虑无人机刚性运动的自由度和柔性机翼的运动自由度,由于机翼的主要变形为弯曲和扭转,所以为了简便起见,把机翼的结构特性简化为梁,仅有垂直于翼面方向的弯曲变形和绕梁轴线的扭转运动,因此可以用局部梁坐标系描述梁的运动,定义局部梁坐标系为原点在翼型中心,方向垂直于翼面指向上[7]。因此,当只考虑无人机的纵向运动时,这时的刚体运自由度有3个,机翼的运动自由度为2n个(n为对机翼进行有限元划分的节点数)。弹性无人机系统的动力学方程可用拉格朗日方程表示为[8]:

式中,e为广义坐标,e=[X,Z,θ,xB]T,X、Z、θ和xB分别为无人机在地轴系中的位置坐标、转角和机翼弹性运动坐标,其中xB=[h1,…,hn、φ1,…,φn]T、hi、φi (i=1…n)分别为第i个梁节点的挠度和扭转角;M、C、K和Q分别为弹性无人机的质量矩阵、阻尼矩阵、刚度矩阵及广义外力。Q由气动力、发动机推力和重力组成,Q体现了无人机运动和机翼弹性运动的耦合。M、C、K可由描述无人机运动的部分和描述机翼弹性运动的部分组合而成:
式中,Mw、Cw、Kw分别为弹性机翼的分质量、阻尼、刚度矩阵,可通过Nastran求解得到[9],m和I′y为无人机的总质量和绕俯仰轴的转动惯量。在考虑机翼结构变形时,I′y可以用下式进行修正[10]:

式中,Iy为刚性无人机绕俯仰轴的转动惯量,mi为梁节点的质量。
对于(1)式,可把弹性机翼运动部分分离出来如(3)式所示:

(3)式对机翼的弹性运动采用了物理坐标进行描述。为了得到较高的求解精度,梁单元数往往取得较多,这时的弹性运动方程维数很高,而且包含了高频的振动特征,而对飞行动力学分析来说,只需要关心与无人机运动频率接近的较低阶结构振动,因此应把上式转化为模态坐标的形式。
采用矩阵变换法等方法可以求得(3)式的模态特征值和正则化模态矩阵μ[11],然后可以进行如下变换:

将(4)式代入(3)式,并前乘以μT可得:

令Mn=μTMwμ、Cn=μTCwμ、Kn=μTKwμ、Qn=μTQ,并且采用模态阻尼矩阵来描述结构的阻尼:Cn=diag(2ζ1ω1,2ζ2ω2,…,2ζnωn),对于本无人机,可根据结构模态实验结果,取ζi=0.02。于是(3)式变为:

采用模态截断法,可以很方便地对以上模态坐标形式的弹性运动方程进行降阶。xnB实际上是从低频到高频排列的模态坐标,对于飞行动力学分析,一般只关心最低的若干阶模态,假设通过分析后发现只需保留第m阶的频率以下的模态即可得到满意的精度,则只需取矩阵μ的前m列进行从(4)式到(6)式的模态坐标转化即可,这时,将使弹性运动方程(3)的阶数从6×n(n为梁单元数)降为m阶,因此可以大大提高运算和仿真的效率。
求得模态坐标下的弹性运动变量后,还需要转化回到物理坐标才便于进行飞行动力学的分析,这时只需把xnB代回(4)式即可。
1.2 准定常气动力为了准确分析弹性无人机的运动,必须研究振动机翼所受的气动力,该气动力随时间变化,是非定常的过程。为了简化计算,引入准定常假设,认为气流只在机翼后缘分离,并随机翼的振动改变了诱导速度。因此,根据格罗斯曼理论,无人机的准定常气动力为[12]:
图1 翼型气动力计算图例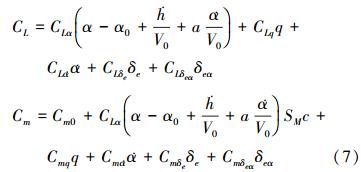
其中的SM为无人机的纵向静稳定裕度,c为机翼的平均气动弦长,CLα、Cm0和α0等数据根据现有机翼气动数据得到。 体现了机翼的弹性运动对无人机气动力的影响。δea指的是在机翼外侧后缘上的升降副翼。(7)式中,由于对q、
体现了机翼的弹性运动对无人机气动力的影响。δea指的是在机翼外侧后缘上的升降副翼。(7)式中,由于对q、 和δe的气动力是由平尾提供的,所以在计算机翼单元的受力时不用考虑。
和δe的气动力是由平尾提供的,所以在计算机翼单元的受力时不用考虑。
为了便于进行动力学分析和控制律设计,需要对(1)式进行线性化处理。本文采用的是在时域内展开的方法。对于无人机的运动部分,可以充分利用刚性飞机的处理方法,但是要考虑机翼弹性带来附加气动力的影响[13],同时,假设无人机的弹性变形量很小,因此转动惯量Iy维持静气动弹性位置的值不变,于是无人机运动的小扰动方程可以写为:

式中: ,Apw为气动弹性对无人机运动的影响,可根据(7)式得到,其他变量与刚性飞机的相同。
,Apw为气动弹性对无人机运动的影响,可根据(7)式得到,其他变量与刚性飞机的相同。
同样地,由小弹性变形量假设,认为梁坐标系仍然垂直于地面,于是得到机翼的弹性运动小扰动方程为:
式中:
 ,Awp和Bw为无人机运动和操纵对机翼气动力的影响,可根据(7)式得到,Aw的表达式为:
,Awp和Bw为无人机运动和操纵对机翼气动力的影响,可根据(7)式得到,Aw的表达式为:
因此,综合(8)式和(9)式,得到弹性无人机的小扰动状态方程为:

式中
为了分析机翼的弹性对纵向动力学特性的影响,本文分别对3种不同的情况进行了对比,即完全刚性的无人机、只考虑静气动弹性的无人机和完全弹性的无人机。其中,只考虑静气动弹性的无人机的机翼变形量可以根据(1)式计算,即静气动弹性情况下 和
和 为0,因此机翼的变形量为:
为0,因此机翼的变形量为:

其中的俯仰轴的转动惯量I′y可由(2)式和(11)式求得。同时,与Iy相关的气动导数也需要重新求解。
完全刚性的无人机、只考虑静气动弹性的无人机,和完全弹性的无人机的纵向短周期和长周期特性比较见表1和表2:
由以上两表可见,考虑静气动弹性后,由于机翼上翘的影响使无人机绕俯仰轴的转动惯量加大,所以绕俯仰轴的大导数减小,从而使得短周期的频率和阻尼都明显减小了,长周期的频率变化不大,但是阻尼也明显地减小。
由无人机完全弹性运动方程求得的特征根如下表所示:
| 模态 | 特征根 | 频率/(rad·s-1) | 阻尼 |
| 长周期 | -0.019±0.3387i | 0.339 | 0.058 |
| 短周期垂直一弯 | -0.394±1.707i | 1.751 | 0.225 |
| -3.819±1.459i | 4.09 | 0.934 | |
| 垂直二弯 | -2.561±17.051i | 17.242 | 0.149 |
| 一扭 | -1.412±37.167i | 37.193 | 0.038 |
| 垂直三弯 | -3.131±47.774i | 47.876 | 0.065 |
3种无人机的操纵期望参数(CAP)对比如表4所示:
由以上可见,刚性运动的短周期模态和弹性运动的垂直一弯模态与刚性弹性分离所求得的结果有很大差异,单从特征根已经无法区分这2个模态,体现了较严重的耦合特性。结合飞行品质规范发现,刚性和静气动弹性无人机的长、短周期模态特性都满足1级飞行品质,但是完全弹性无人机的短周期模态阻尼仅满足3级飞行品质要求;刚性和静气动弹性无人机的CAP可满足3级飞行品质,但是完全弹性无人机的不能满足3级飞行品质要求。因此,对于这种飞行动力学模态和结构振动模态很接近的太阳能无人机,仅采用静气动弹性无人机的动力学模型也无法准确判断无人机的飞行动力学特性。
2.2 根轨迹从上文分析可见,对本太阳能无人机刚性动力学特性影响最大的结构模态是垂直一弯模态。为了明确无人机在不同的结构特性下的动力学特性,为总体设计、结构设计等进一步优化提供参考,计算得到垂直弯曲刚度从大到小变化时的完全弹性无人机纵向根轨迹如图2所示,其中K值越大,代表越接近刚性无人机的特性,K值越小无人机的超柔性结构效应越明显:
 |
| 图 2 刚度从大到小变化时的纵向根轨迹 |
为了简洁起见,图2中只保留了一弯、短周期和长周期3个模态的根轨迹图,长周期根轨迹的放大图也同时在该图中给出,图中用K来表示相对设计状态的刚度比例,根轨迹的起点是K=100(设计刚度的100倍)的根,终点是K=0.3的根,用方框表示的是K=1,即本报告所研究的超柔性无人机本轮结构设计状态下的根。
由图2分析可得,当K<0.42时,无人机的长周期模态将发散;当K<0.6左右时,一弯模态由1对复根变为2个实根;当K>20时,结构运动对无人机的刚体运动(包括长周期和短周期模态)影响很小,这时采用刚性无人机模型(K=∞)进行分析也可以得到较满意的精度。但是,从表中可以看到当K>20时的翼尖挠度非常小,这对于采用超轻质结构的太阳能无人机来说几乎是无法实现的,因此,进行太阳能无人机的动力学分析、飞行控制与飞行仿真等研究,只有采用完全弹性模型才有可能得到准确的结果。
3 控制律设计 3.1 常规控制律根据原无人机动力学的特点,对于刚性无人机,采用以下控制律:

当取Kq=0.42,Kθ=0.92,和KV=6时,即可得到比较满意的动态响应特性,但是对弹性无人机来说,由于机翼的弹性运动和无人机的动力学运动耦合,导致长周期的频率和阻尼都明显增大,所以和刚性无人机的相比差别很大,在实际应用中,对弹性无人机必须设计新的控制律。
当对静气动弹性变形的无人机和完全弹性的无人机采用(12)式所示的控制律和表5的增益参数后,和原刚性无人机的对比如图3所示:
 |
| 图 3 不同运动模型的俯仰角响应对比 |
由此可见,只考虑静气动弹性变形的无人机只要稍微增大纵向阻尼的反馈即可,而柔性无人机的控制律却需要做较大的调整。采用各自的控制律后,3种无人机的动态响应特性比较接近。
3.2 机翼变形抑制机翼的弹性变形带来的附加气动力会对无人机运动带来较大的扰动,这将会增大无人机的迎角,过大的迎角反应除了降低飞行的稳定性和安全裕量之外,也会引起较大的法向过载,这对机载设备的正常工作也会带来较大影响,因此应该设法消除。因此,为了得到更平稳的无人机动态响应,必须采用更进一步的控制方法,对机翼的弹性变形进行一定的抑制。
在俯仰角操纵引起的机翼变形中,扭转角变形量总体而言较小,垂直变形较大,其中又是翼尖的变形量最大,所以很自然地想到在刚性无人机控制律的基础上加入采用翼尖变形量到升降副翼的反馈进行机翼弹性变形抑制的控制,这时的控制律为:
式中,hn为翼尖的垂直变形量。
当取khn=10时的无人机俯仰角响应如图4所示。由图可见,这时的俯仰角响应与无升降副翼控制时很接近。
 |
| 图 4 带δea控制的俯仰角响应 |
有无升降副翼控制时的迎角响应和机翼挠度对比如下所示:
由以上可见,加入升降副翼的控制后能使机翼的变形量明显减小,从而无人机的迎角响应也更小,说明了采用翼尖变形量到升降副翼的反馈进行机翼弹性变形抑制的控制是有效的。
 |
| 图 5 带δea控制的迎角响应对比 |
 |
| 图 6 带δea控制的机翼变形响应对比 |
考虑静气动弹性后,由于机翼上翘的影响使无人机绕俯仰轴的转动惯量加大,所以绕俯仰轴的大导数减小,从而使得短周期的频率和阻尼都明显减小了,长周期的频率变化不大,但是阻尼也明显地减小,所以采用刚性无人机的运动方程进行飞行动力学特性分析,得到的结果将会偏于乐观。
通过随机翼刚度变化的纵向根轨迹图可以发现,无人机的纵向特征根随机翼刚度变化很明显,尤其当刚度较小时将会出现短周期和一弯模态耦合、长周期不稳定等不利现象,因此,进行太阳能无人机的动力学分析、飞行控制与飞行仿真等研究,只有采用完全弹性的动力学模型才有可能得到准确的结果。
采用刚性和静气动弹性模型得到的俯仰角速度和俯仰角反馈增益都比弹性模型小,必须做出较大的调整才能满足弹性无人机的需求,而且为了更好地减小迎角响应,还需要引入升降副翼对机翼的挠度进行抑制。
| [1] | Rafael Palacios, Carlos E S Cesnik. Structural Models for Flight Dynamic Analysis of Very Flexible Aircraft[R]. AIAA-2009-2403 |
| Click to display the text | |
| [2] | Brijesh Raghavan, Mayuresh Patil. Flight Dynamics of High Aspect-Ratio Flying Wings: Effect of Large Trim Deformation[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit, Hilton Head, SC, 2007 |
| Click to display the text | |
| [3] | Kevin M Roughen, Oddvar O Bendiksen, Myles L Baker. Development of Generalized Aeroservoelastic Reduced Order Models[R]. AIAA-2009-2491 |
| Click to display the text | |
| [4] | Woehrle T G, Costerus B W, Lee C L. Modal Analysis of PATHFINDER Unmanned Air Vehicle[C]//IMAC-XⅢ Conference, 1995 |
| Click to display the text | |
| [5] | 谢长川, 吴志刚, 杨超. 大展弦比柔性机翼的气动弹性分析[J]. 北京航空航天大学学报2003, 29(12):1087-1090 Xie Changchuan, Wu Zhigang, Yang Chao. Aeroelastic Analysis of Flexible Large Aspect Ratio Wing[J]. Journal of Beijing University of Aeronautics and Astronautics, 2003, 29(12): 1087-1090 (in Chinese) |
| Cited By in Cnki (18) | Click to display the text | |
| [6] | Mayuresh J Patil, Dewey H Hodges. Flight Dynamics of Highly Flexible Flying Wings[J]. Journal of Aircraft, 2006, 43(6): 1790-1798 |
| Click to display the text | |
| [7] | Su Weihua. Coupled Nonlinear Aeroelasticity and Flight Dynamics of Fully Flexible Aircraft[D]. University of Michigan, 2008 |
| Click to display the text | |
| [8] | Cesnik Carlos E S, Su Weihua. Nonlinear Aeroelastic Modeling and Analysis of Fully Flexible Aircraft[R]. AIAA-2005-2169 |
| Click to display the text | |
| [9] | Azoulay D, Karpel M. Characterization of Methods for Computation of Aeroservoelastic Response to Gust Excitation[R]. AIAA-2006-1938 |
| Click to display the text | |
| [10] | Brijesh Raghavan, Mayuresh Patil. Flight Dynamics of High Aspect-Ratio Flying Wings[R]. AIAA-2006-6135 |
| Click to display the text | |
| [11] | 王尚文, 余旭东, 赵育善. 飞行器结构动力学[M]. 西安: 西北工业大学出版社, 1998 Wang Shangwen, Yu Xudong, Zhao Yushan. Structural Dynamics of Aircraft[M]. Xi'an: Northwestern Polytechnical University Press, 1990 (in Chinese) |
| [12] | 陈桂彬, 邹丛青, 杨超. 气动弹性设计基础[M]. 北京: 北京航空航天大学出版社, 2004 Chen Guibin, Zou Congqing, Yang Chao. Foundational of Design of Aeroelastic[M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2004 (in Chinese) |
| [13] | 何植岱, 高浩. 高等飞行动力学[M]. 西安: 西北工业大学出版社, 1990 He Zhidai, Gao Hao. Advanced Flight Dynamics[M]. Xi'an: Northwestern Polytechnical University Press, 1990 (in Chinese) |
2. Science and Technology of UAV Laboratory, Northwestern Polytechnical University, Xi'an 710065, China