

2. 航天飞行动力学技术重点实验室, 陕西西安 710072
着眼于未来可重复使用飞行器(reusoble launch vehicle,RLV)快速、安全、可靠、廉价地进入空间的要求,急需发展先进的制导和控制技术,以大幅改善可重复使用飞行器执行任务时的安全性和可靠性[1, 2]。末端区域能量管理(terminal area energy management,TAEM)是可重复使用飞行器返回过程中的一项关键技术,此段的主要目的是耗散再入段结束后飞行器的多余能量,同时将飞行器由再入段终点(terminal entry point,TEP)导引到自动着陆窗口(auto landing interface,ALI),这对末端区域能量管理段的轨迹设计和制导、控制方案提出了很高的要求[3]。
20世纪80年代,美国的航天飞机采用了混合基准(hybrid baseline)的末端区域能量管理方案[4],通过航天飞机的实际运行证明这种方案的有效性,但是这种方案依赖于离线确定的几种标准轨迹,适应性较差,已难以满足未来可重复使用运载器灵活使用的需求。新的太空运输系统需要一种自适应的在线算法,以对不同的任务需求快速地生成飞行剖面和制导指令。在航天飞机末端区域能量管理方案的基础上,国内外很多学者提出了多种在线轨迹规划算法和制导方法。Hull等[5]为X-37可重复使用飞行器末端区域能量管理段和自动着陆段提出在线轨迹重构算法,其主要是考虑故障模式下的轨迹重构;Horneman、Kluever等[6, 7, 8, 9]以迭代3个轨迹参数生成不同的轨迹剖面,简化了轨迹设计,但需要迭代生成数量较多的轨迹并从中挑选出符合要求的轨迹;Mayanna等[10]以较少的轨迹参数描绘出类似运动跟踪(race track)方案[4]的轨迹,并以此给出制导方法,这种方法需要求出状态反馈矩阵的零极点,其过程相对复杂。
本文结合传统混合基准方法及运动跟踪方案,提出了3段校正直接进场的末端区域能量管理方法。该方法水平轨迹由3个校正圆与3段直线构成,通过动态调节校正圆的大小和位置,实现航程和航向的精确调整。纵向轨迹由2段高度-航程二次曲线构成,通过跟踪2段二次曲线实现高度与速度的控制。该设计方法具有简单、灵活及鲁棒性强的优点,且避免了S机动带来的频繁横滚。
1 运动学模型为准确描述RLV的运动状态,建立跑道坐标系Oxyz,如图 1所示,坐标原点O取在机场跑道入口中
 |
| 图 1 TAEM段水平面投影轨迹示意图 |
心线上;Ox轴位于当地水平面内,沿跑道延伸方向为正;Oy轴垂直于当地水平面,向上为正;Oz轴根据右手法则确定。无动力RLV(视为质点)三自由度滑翔运动方程为
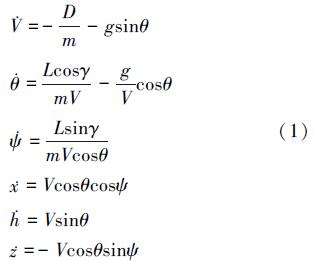
运动方程中,状态变量V、θ、Ψ、h分别表示飞行器的速度、航迹倾角、航迹偏角和高度,γ为速度滚转角,m、D、L为飞行器的质量、阻力和升力,D和L的定义如下

式中: ,Sref为飞行器参考面积,CD、CL分别是阻力系数和升力系数。上述运动方程组是在“瞬时平衡”的假设下建立的,且忽略了地球曲率的影响。
,Sref为飞行器参考面积,CD、CL分别是阻力系数和升力系数。上述运动方程组是在“瞬时平衡”的假设下建立的,且忽略了地球曲率的影响。
由于没有S机动带来的频繁横滚,故忽略状态耦合对飞行的不利影响[11],将TAEM段横、纵向轨迹分开设计,以简化设计过程。水平轨迹设计需要满足航程、终端横纵向位移和航迹偏角等的约束;纵向轨迹设计应同时满足飞行器的航程和能量(即速度和高度)要求。
2.1 水平面内轨迹设计水平面轨迹设计特点是航程可调,轨迹由3段圆弧和3条直线组成,通过调整各圆弧的半径和圆弧c1的转角ΔΨ1(如图 1中所示),达到调节总航程的目的,从而适应不同的初始状态。由于规划轨迹是以航程为基准的,因此准确预测出TAEM段的航程是轨迹设计的首要任务,图 1为水平面投影轨迹示意图。虚线p11T为过点p11且与第三个校正圆相切的直线,切点为T,点G是虚线p11T的黄金分割点(|p11G|=0.618|p11T|),把过点G且垂直于p11T的射线g称之为黄金分割线。
TAEM段始于再入段终点,至自动着陆窗口结束,总航程Statal可表示为

式中:Sci和Sli(i=1,2,3)分别为各个轨迹段的航程。准确的预测出航程需要先确定轨迹的几何参数,下面给出轨迹主要几何参数的推算方法。
1) 第一、三段圆弧中心位置确定
圆弧中心O1的位置由初始状态决定

式中:z0、x0和Ψ0是TAEM段初始点位置和初始航迹偏角,s为圆弧段的转弯方向(在本文中规定:左转s=1,右转s=-1),R1为转弯半径

式中:Vh=Vcosθ为速度在水平面内的投影,γ1是第一段圆弧允许的最大速度滚转角。圆弧中心O3的位置相对于跑道的位置而定

式中:d为圆弧中心至跑道入口的距离,R3为转弯半径,参数d、R3轨迹设计时给出。
2) 第二段圆弧中心位置确定
第二段圆弧中心位于黄金分割线g上,在zOx坐标系中,黄金分割线g的斜率为kg
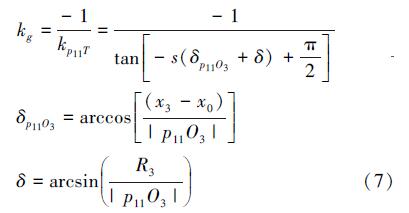
式中:Δp11O3是p11O3与x轴正向的夹角,kp11T为虚线 。
。

式中: ,得出黄金分割线的方程
,得出黄金分割线的方程

点p12的位置可表示为

式中:ΔΨ1是第一段圆弧的转角。可得出了平行于直线l1且通过点O2的直线方程

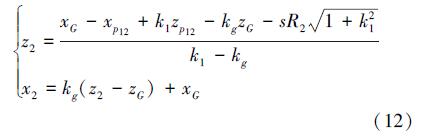
式中:k1=tan(Ψ0+sΔΨ1+π/2)为直线l1的斜率,R2为转弯半径,在设计轨迹时给出。联解(9)式、(11)式得O2的位置
3) 轨迹递推逻辑
根据TAEM段的几何轨迹参数:R2、R3、d、ΔΨ1和期望航程Sgiven,就可以生成一系列标称轨迹,并得到相应的航程。R2、R3、d为轨迹设计参数,则标称轨迹航程可表示为ΔΨ1的函数Stotal(ΔΨ1),通过迭代ΔΨ1使之满足(13)式完成轨迹设计,其基本逻辑如图 2所示。
 |
| 图 2 轨迹递推逻辑图 |

根据航天飞机经验,转弯阶段应避开存在未知危险的跨音速区[4],故TAEM段纵向轨迹以音速为界分为高速段和低速段,如图 3所示。轨迹由2段二次曲线构成,即高度为随航程变化的二次多项式

 |
| 图 3 纵向轨迹示意图 |
S为当前航程,ai和bi(i=1,2,3)分别为2段曲线系数。第一段曲线(曲线1)对应航程段S1=Sc1+Sl1+Sc2,第二段曲线(曲线2)对应航程段S2=Sl2+Sc3+Sl3。在2段曲线的初始位置,即S=0时,对曲线1有a0=h0,对曲线2有b0=hp。(14)式对航程S求导得

同样在S=0时,对曲线1有a1=tanθ0,对曲线2有b1=tanθp。依次把S=S1和S=S2代入(14)式、(15)式所得4个方程组联解可得
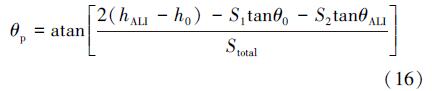



至此,纵向轨迹的2组6个参数全部确定。
3 制导方法标称轨迹的设计为TAEM段飞行提供了参考剖面(包含位置、速度、高度等的详细参考信息),制导指令则根据剖面所决定的参考量进行在线计算,制导指令由法向过载和速度滚转角给出。
3.1 水平面内制导指令水平面内的制导用于控制飞行器的航向,标称轨迹的跟踪由制导指令γC来完成,下面分别给出了各个分段水平面内的制导指令。
1) 圆弧段c1、c2的制导指令
圆弧c1、c2的目的是调整飞行器航向,所以采用同一方法生成制导指令,即γC是当前航迹偏角和终端航迹偏角之差的函数

式中,Gturn为航迹偏角偏差增益,Ψv、Ψfinal为圆弧转弯段的当前、终端航迹偏角。
2) 直线段l1、l2的制导指令
航天飞机此段制导指令的生成算法与圆弧段c1、c2相同;本文由于考虑到姿态控制的动态过程,在转弯段结束后可能产生航迹偏角偏差和较大的位置偏差(如图 4中Δd),为消除这种位置偏差,需在直线飞行阶段加以修正,以防止偏差过大。
 |
| 图 4 水平面内直线段制导方案示意图 |
在l1、l2轨迹段飞行时,飞行器的参考速度矢量应始终指向目标点(图 1中的p21、p31点),如图 4所示,其制导指令为

式中:Gaim为航迹偏角偏差增益,Ψv、Ψaim分别是飞行器当前的航迹偏角和飞行器由当前位置指向目标点的方位角,Ψaim由如下式子得到

z、x是当前飞行器的位置坐标,xaim、zaim是目标点的位置坐标。
3) 圆弧段c3的制导指令
圆弧段c3制导指令由开环和闭环两部分构成

开环指令γ*由转弯段的速度和航迹倾角决定

Δγ由PD控制给出

式中,GR和GdR分别为半径偏差增益和半径变化率偏差增益,ΔR为参考圆弧半径和当前位置到圆弧中心之间的距离偏差,Δ 为参考径向速度与当前速度在径向的分量之间的偏差。
为参考径向速度与当前速度在径向的分量之间的偏差。
4) 直线段l3的制导指令
l3段制导指令由PD控制给出,用来消除横向位置的偏差

式中:Gz和Gdz分别为横向位移偏差增益和横向位移变化率误差增益,z为偏离跑道中轴线的位移, 为当前速度在垂直于跑道中轴线方向的分量。
为当前速度在垂直于跑道中轴线方向的分量。
纵向制导用于控制飞行器的能量,通过预测航程和能量以改变飞行器的法向过载来实现。本文只给出简要的纵向制导指令的生成方法,详细过程可以参考文献[6]。法向过载指令由开环和闭环两部分组成

其中开环参考法向过载

而Δny采用PD控制,用以修正高度偏差

高度偏差Δh=href-h,铅垂速度偏差Δ =ref-。
=ref-。
考虑到实际飞行中姿态运动的动态过程,采用如下模型来近似考虑纵向控制回路的动态过程
式中:俯仰角速度系数Gq=0.7 rad/g·s,ny为实际法向过载,q是俯仰角速率。通过对上两式积分可求得俯仰角,攻角由α=ϑ-θ求出,其中ϑ为俯仰角。
速度滚转角采用相似于纵向的一个延迟模型

式中,γ为实际速度滚转角,设γ的最大变化率为5 °/s。
飞行过程中,为保证飞行的安全,轨迹设计必须满足轨迹各个阶段限定的物理约束:
1) 速度滚转角约束:在飞行马赫数Ma> 0.95时,允许的最大速度滚转角为50°;圆弧段c3和直线段l3允许的最大速度滚转角分别为60°和30°;其余飞行段不超过40°。
2) 过载约束:在整个的飞行过程中,最大法向过载限制为2.5。
4.2 仿真结果及其分析飞行器进入末端区域能量管理段的初始状态为:V0=750 m/s,θ0=-9°,Ψ0=45°,x0=79.5 km,h0=25 km,z0=58.5 km;终端约束为:VALI=160 m/s,θALI=-20°,xALI=15 km,hALI=3 km,ΨALI和zALI都为零。图 5是在此状态下的三维标称轨迹。
 |
| 图 5 标称轨迹三维图 |
图 6给出了采用本文制导方法与传统制导方法的跟踪结果。可以看出,在l1、l2段制导指令中加入对位置偏差的修正能够很好的跟踪标称轨迹,并达到自动着陆窗口,避免了位置偏差的持续积累而不能进入自动着陆窗口,传统的方法则不能进入自动着陆窗口。由此表明,本文的制导指令生成策略是可行的,能够满足进一步的实验仿真要求。
 |
| 图 6 水平面投影轨迹对比 |
图 7和图 8分别为对标称轨迹跟踪时的速度滚转角和航迹偏角。从图中可以看出,由于考虑了控制系统的动态过程,实际指令和名义指令并不完全吻合。控制系统的动态过程会使得水平面内的位置(图 6中所示)和航迹偏角出现偏差,若对偏差不加修正,则无法保证满足终端约束。
 |
| 图 7 速度滚转角跟踪 |
 |
| 图 8 航迹偏角 |
图 9是初始位置出现偏差时的仿真结果图,表明在满足终端约束条件下,本文的制导方案能够根据初始状态规划新的标称轨迹,亦即有很强的适应性。
 |
| 图 9 不同初始位置时的水平面投影轨迹 |
本文以可重复使用飞行器为对象,对TAEM段的轨迹设计方法和制导方案进行了研究和分析,给出了一种简单、快捷地在线生成末端区域能量管理段轨迹的方法和制导方案,并通过数值仿真验证了这种轨迹设计方法的合理性和制导方案跟踪标称轨迹的有效性。本文可以得出的结论有:
1) 以5个参数给出一条参数化水平面投影轨迹,在不同的初始状态下迭代其中的两个参数可以实时生成满足要求的轨迹;
2) 采用有别于航天飞机的制导方案,分别给出转弯段和直线段的制导指令,能够很好的跟踪标称轨迹,提高了到达自动着陆窗口的精度。
后续工作将致力于完善并优化轨迹设计方法和制导方案以及如何应用于六自由度的模型之中。
| [1] | Hanson J M. A Plan for Advanced Guidance and Control Technology for 2nd Generation Reusable Launch Vehicles[R]. AIAA-2002-4557 |
| Click to display the text | |
| [2] | Hanson J M. New Guidance for New Launch Vehicles[J]. Aerospace American, 2003, 41(3): 36-41 |
| [3] | 沃云峰. 可重复使用飞行器末端能量管理段轨迹与制导[D]. 西安:西北工业大学, 2005,Wo Yunfeng. The Terminal Area Energy Management Trajectory Design and Guidance for a Reusable Launch Vehicle[D]. Xi′an, Northwestern Polytechnical University, 2005 (in Chinese) |
| Cited By in Cnki (6) | |
| [4] | Moore T E. Space Shuttle Entry Terminal Area Energy Management[M]. National Aeronautics and Space Administration, Lyndon B Johnson Space Center, 1991 |
| [5] | Hull, J R, Gandhi H, Schierman J D. In-Flight TAEM/Final Approach Trajectory Generation for Reusable Launch Vehicles[R]. AIAA-2005-7114 |
| Click to display the text | |
| [6] | Horneman K R, Kluever C A. Terminal Area Energy Management Trajectory Planning for an Unpowered Reusable Launch Vehicle[R]. AIAA-2004-5183 |
| Click to display the text | |
| [7] | Kluever C A, Horneman K R, Schierman J D. Rapid Terminal-Trajectory Planner for an Unpowered Reusable Launch Vehicle[R]. AIAA-2009-5766 |
| Click to display the text | |
| [8] | Kluever C A. Terminal Guidance for an Unpowered Reusable Launch Vehicle with Bank Constraints[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(1): 162-168 |
| Click to display the text | |
| [9] | Kluever C A, Horneman K R. Terminal Trajectory Planning and Optimization for an Unpowered Reusable Launch Vehicle[R]. AIAA-2005-6058 |
| Click to display the text | |
| [10] | Mayanna A, Grimm W, Well K H. Adaptive Guidance for Terminal Area Energy Management (TAEM) of Reentry Vehicles[R]. AIAA-2006-6037 |
| Click to display the text | |
| [11] | 潘彦鹏, 周军, 呼卫军. 一种基于在线能量推演的自适应末端能量管理方法[J]. 西北工业大学学报,2012,30(5): 757-762,Pan Yanpeng, Zhou Jun, Hu Weijun. Effective and Adaptive Method of Terminal Area Energy Management (TAEM) Based on Online Energy Backstepping[J]. Journal of Northwestern Polytechnical University, 2012,30(5): 757-762 (in Chinese) |
| Cited By in Cnki (2) | Click to display the text |
2. Science and Technology on Aerospace Flight Dynamics Laboratory, Northwestern Polytechnical University, Xi'an 710072, China